 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable NAS with Factorizable Architectural Parameters
Paper and Code
Dec 31, 2019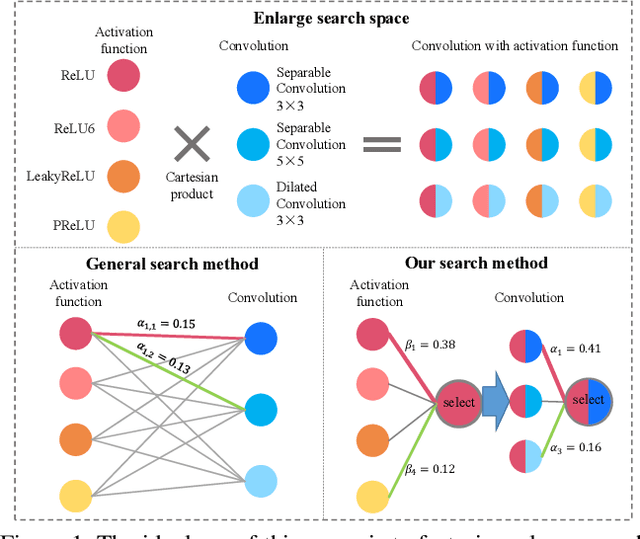


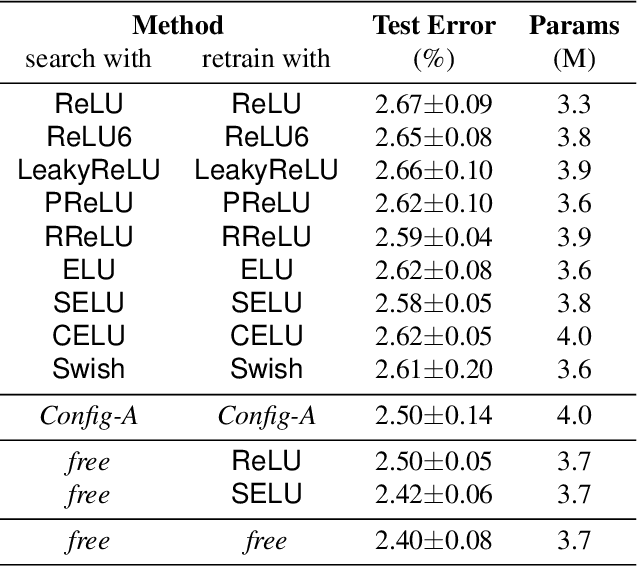
Neural architecture search (NAS) is an emerging topic in machine learning and computer vision. The fundamental ideology of NAS is using an automatic mechanism to replace manual designs for exploring powerful network architectures. One of the key factors of NAS is to scale-up the search space, e.g., increasing the number of operators, so that more possibilities are covered, but existing search algorithms often get lost in a large number of operators. This paper presents a scalable NAS algorithm by designing a factorizable set of architectural parameters, so that the size of the search space goes up quadratically while the burden of optimization increases linearly. As a practical example, we add a set of activation functions to the original set containing convolution, pooling and skip-connect, etc. With a marginal increase in search costs and no extra costs in retraining, we can find interesting architectures that were not explored before and achieve state-of-the-art performance in CIFAR10 and ImageNet, two standard image classification benchmarks.