 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSample-Efficient Deep RL with Generative Adversarial Tree Search
Paper and Code
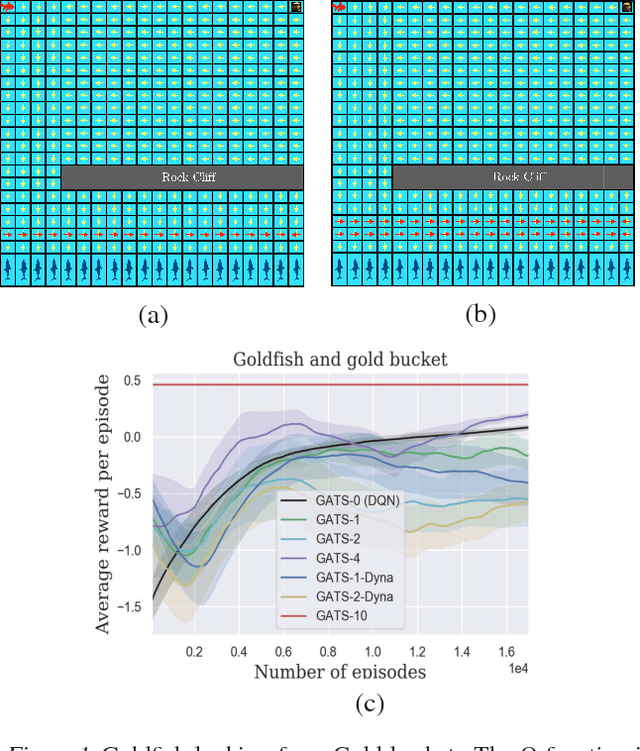
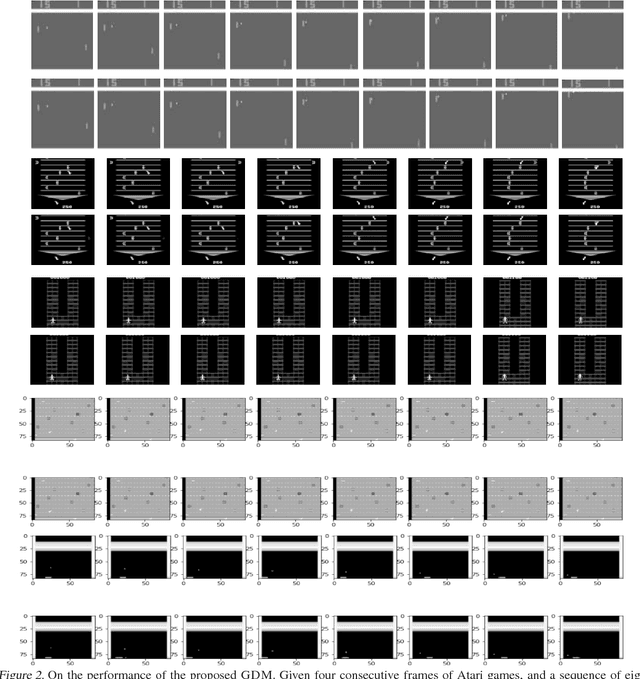

We propose Generative Adversarial Tree Search (GATS), a sample-efficient Deep Reinforcement Learning (DRL) algorithm. While Monte Carlo Tree Search (MCTS) is known to be effective for search and planning in RL, it is often sample-inefficient and therefore expensive to apply in practice. In this work, we develop a Generative Adversarial Network (GAN) architecture to model an environment's dynamics and a predictor model for the reward function. We exploit collected data from interaction with the environment to learn these models, which we then use for model-based planning. During planning, we deploy a finite depth MCTS, using the learned model for tree search and a learned Q-value for the leaves, to find the best action. We theoretically show that GATS improves the bias-variance trade-off in value-based DRL. Moreover, we show that the generative model learns the model dynamics using orders of magnitude fewer samples than the Q-learner. In non-stationary settings where the environment model changes, we find the generative model adapts significantly faster than the Q-learner to the new environment.