 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Reinforcement Learning for Legged Locomotion
Paper and Code
Mar 05, 2022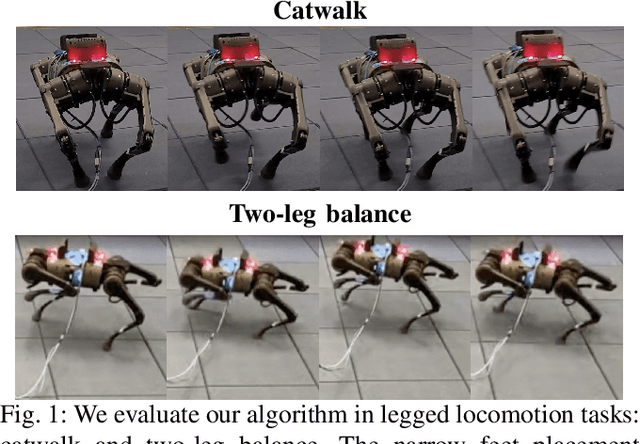
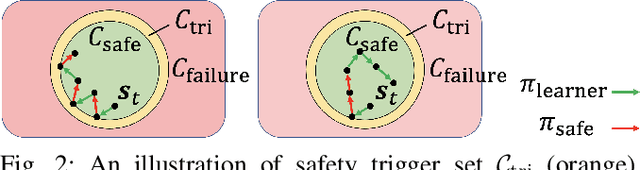

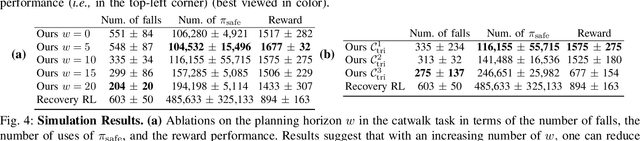
Designing control policies for legged locomotion is complex due to the under-actuated and non-continuous robot dynamics. Model-free reinforcement learning provides promising tools to tackle this challenge. However, a major bottleneck of applying model-free reinforcement learning in real world is safety. In this paper, we propose a safe reinforcement learning framework that switches between a safe recovery policy that prevents the robot from entering unsafe states, and a learner policy that is optimized to complete the task. The safe recovery policy takes over the control when the learner policy violates safety constraints, and hands over the control back when there are no future safety violations. We design the safe recovery policy so that it ensures safety of legged locomotion while minimally intervening in the learning process. Furthermore, we theoretically analyze the proposed framework and provide an upper bound on the task performance. We verify the proposed framework in four locomotion tasks on a simulated and real quadrupedal robot: efficient gait, catwalk, two-leg balance, and pacing. On average, our method achieves 48.6% fewer falls and comparable or better rewards than the baseline methods in simulation. When deployed it on real-world quadruped robot, our training pipeline enables 34% improvement in energy efficiency for the efficient gait, 40.9% narrower of the feet placement in the catwalk, and two times more jumping duration in the two-leg balance. Our method achieves less than five falls over the duration of 115 minutes of hardware time.