 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRuleFuser: Injecting Rules in Evidential Networks for Robust Out-of-Distribution Trajectory Prediction
Paper and Code
May 18, 2024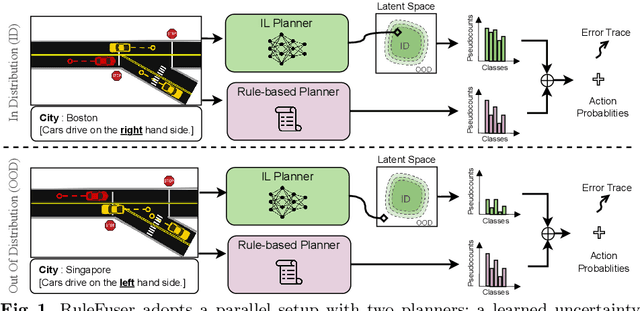

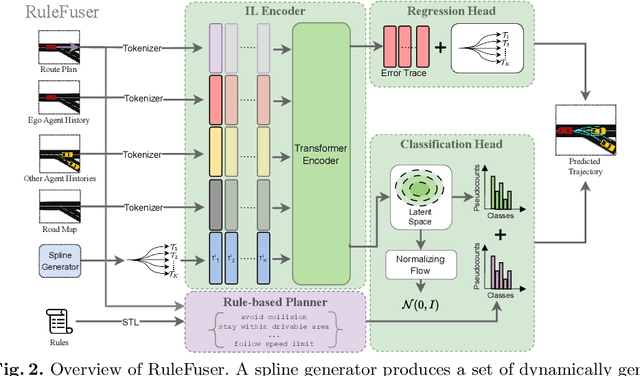

Modern neural trajectory predictors in autonomous driving are developed using imitation learning (IL) from driving logs. Although IL benefits from its ability to glean nuanced and multi-modal human driving behaviors from large datasets, the resulting predictors often struggle with out-of-distribution (OOD) scenarios and with traffic rule compliance. On the other hand, classical rule-based predictors, by design, can predict traffic rule satisfying behaviors while being robust to OOD scenarios, but these predictors fail to capture nuances in agent-to-agent interactions and human driver's intent. In this paper, we present RuleFuser, a posterior-net inspired evidential framework that combines neural predictors with classical rule-based predictors to draw on the complementary benefits of both, thereby striking a balance between performance and traffic rule compliance. The efficacy of our approach is demonstrated on the real-world nuPlan dataset where RuleFuser leverages the higher performance of the neural predictor in in-distribution (ID) scenarios and the higher safety offered by the rule-based predictor in OOD scenarios.