 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRP-SLAM: Real-time Photorealistic SLAM with Efficient 3D Gaussian Splatting
Paper and Code
Dec 13, 2024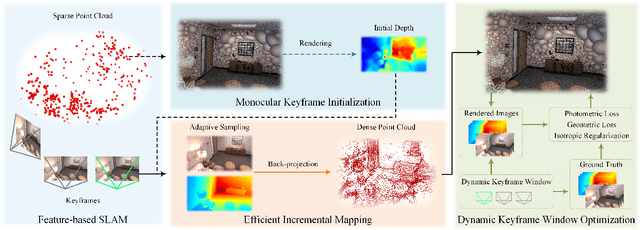
3D Gaussian Splatting has emerged as a promising technique for high-quality 3D rendering, leading to increasing interest in integrating 3DGS into realism SLAM systems. However, existing methods face challenges such as Gaussian primitives redundancy, forgetting problem during continuous optimization, and difficulty in initializing primitives in monocular case due to lack of depth information. In order to achieve efficient and photorealistic mapping, we propose RP-SLAM, a 3D Gaussian splatting-based vision SLAM method for monocular and RGB-D cameras. RP-SLAM decouples camera poses estimation from Gaussian primitives optimization and consists of three key components. Firstly, we propose an efficient incremental mapping approach to achieve a compact and accurate representation of the scene through adaptive sampling and Gaussian primitives filtering. Secondly, a dynamic window optimization method is proposed to mitigate the forgetting problem and improve map consistency. Finally, for the monocular case, a monocular keyframe initialization method based on sparse point cloud is proposed to improve the initialization accuracy of Gaussian primitives, which provides a geometric basis for subsequent optimization. The results of numerous experiments demonstrate that RP-SLAM achieves state-of-the-art map rendering accuracy while ensuring real-time performance and model compactness.