 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRotation-Adaptive Point Cloud Domain Generalization via Intricate Orientation Learning
Paper and Code
Feb 04, 2025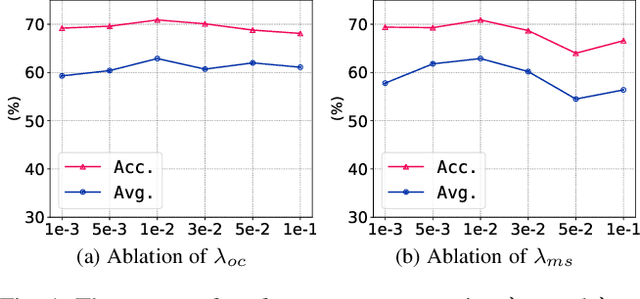



The vulnerability of 3D point cloud analysis to unpredictable rotations poses an open yet challenging problem: orientation-aware 3D domain generalization. Cross-domain robustness and adaptability of 3D representations are crucial but not easily achieved through rotation augmentation. Motivated by the inherent advantages of intricate orientations in enhancing generalizability, we propose an innovative rotation-adaptive domain generalization framework for 3D point cloud analysis. Our approach aims to alleviate orientational shifts by leveraging intricate samples in an iterative learning process. Specifically, we identify the most challenging rotation for each point cloud and construct an intricate orientation set by optimizing intricate orientations. Subsequently, we employ an orientation-aware contrastive learning framework that incorporates an orientation consistency loss and a margin separation loss, enabling effective learning of categorically discriminative and generalizable features with rotation consistency. Extensive experiments and ablations conducted on 3D cross-domain benchmarks firmly establish the state-of-the-art performance of our proposed approach in the context of orientation-aware 3D domain generalization.