Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoofline Model for UAVs:A Bottleneck Analysis Tool for Designing Compute Systems for Autonomous Drones
Paper and Code
Nov 13, 2021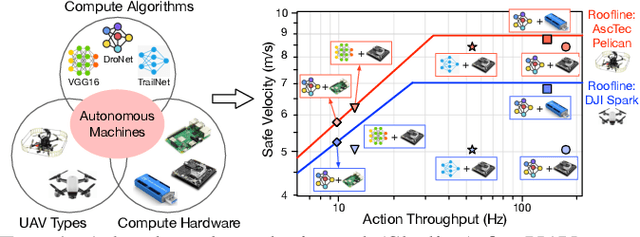
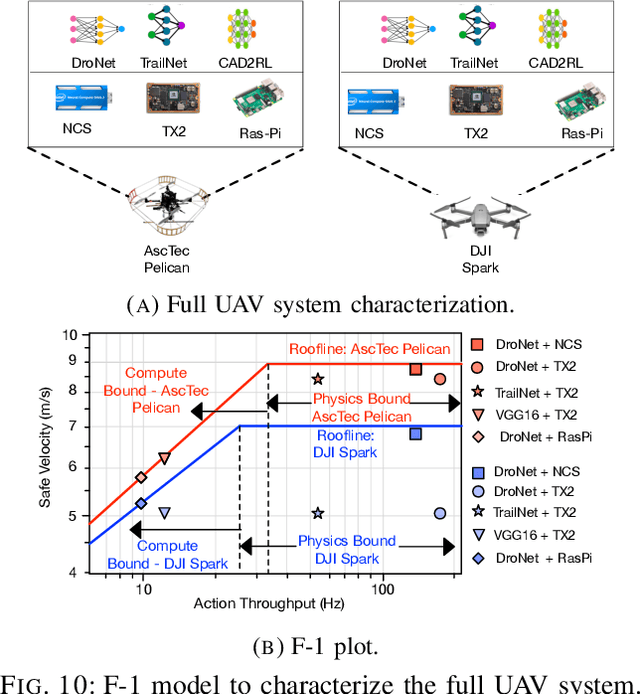


We present a bottleneck analysis tool for designing compute systems for autonomous Unmanned Aerial Vehicles (UAV). The tool provides insights by exploiting the fundamental relationships between various components in the autonomous UAV such as sensor, compute, body dynamics. To guarantee safe operation while maximizing the performance (e.g., velocity) of the UAV, the compute, sensor, and other mechanical properties must be carefully designed (or selected). The goal of our proposed tool is to provide a visual model which aids system architects to understand optimal compute design (or selection) for autonomous UAVs. The tool is available here:~\url{https://bit.ly/skyline-tool}
View paper on