 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobustLoc: Robust Camera Pose Regression in Challenging Driving Environments
Paper and Code
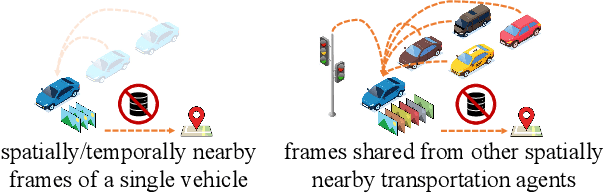
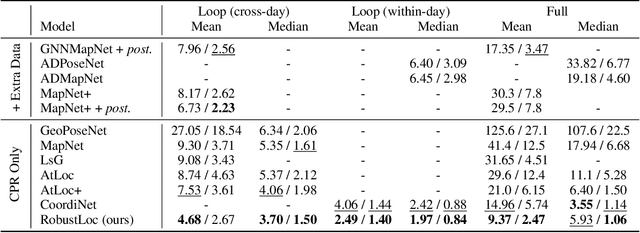
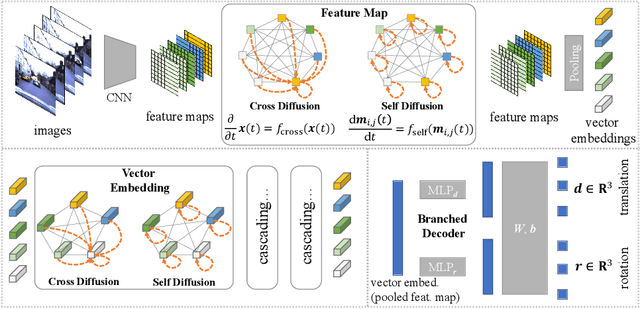
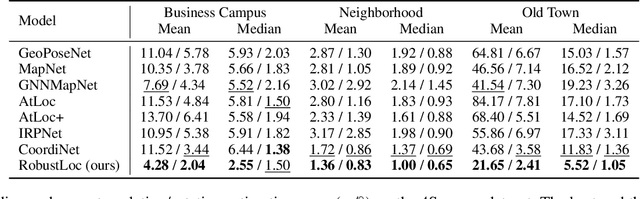
Camera relocalization has various applications in autonomous driving. Previous camera pose regression models consider only ideal scenarios where there is little environmental perturbation. To deal with challenging driving environments that may have changing seasons, weather, illumination, and the presence of unstable objects, we propose RobustLoc, which derives its robustness against perturbations from neural differential equations. Our model uses a convolutional neural network to extract feature maps from multi-view images, a robust neural differential equation diffusion block module to diffuse information interactively, and a branched pose decoder with multi-layer training to estimate the vehicle poses. Experiments demonstrate that RobustLoc surpasses current state-of-the-art camera pose regression models and achieves robust performance in various environments. Our code is released at: https://github.com/sijieaaa/RobustLoc