 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Locally-Linear Controllable Embedding
Paper and Code
Feb 21, 2018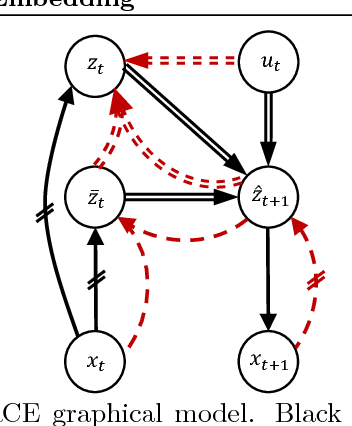
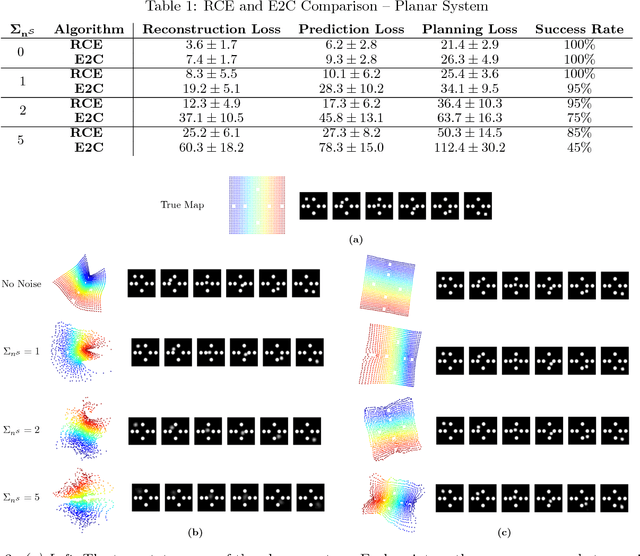
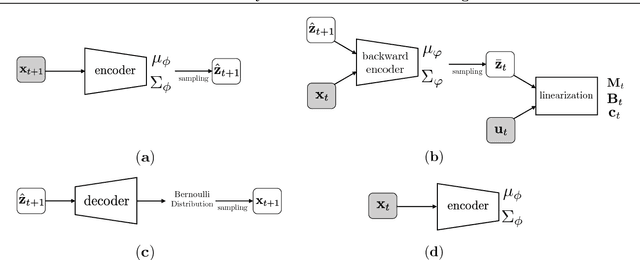
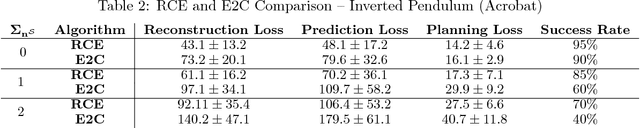
Embed-to-control (E2C) is a model for solving high-dimensional optimal control problems by combining variational auto-encoders with locally-optimal controllers. However, the E2C model suffers from two major drawbacks: 1) its objective function does not correspond to the likelihood of the data sequence and 2) the variational encoder used for embedding typically has large variational approximation error, especially when there is noise in the system dynamics. In this paper, we present a new model for learning robust locally-linear controllable embedding (RCE). Our model directly estimates the predictive conditional density of the future observation given the current one, while introducing the bottleneck between the current and future observations. Although the bottleneck provides a natural embedding candidate for control, our RCE model introduces additional specific structures in the generative graphical model so that the model dynamics can be robustly linearized. We also propose a principled variational approximation of the embedding posterior that takes the future observation into account, and thus, makes the variational approximation more robust against the noise. Experimental results show that RCE outperforms the E2C model, and does so significantly when the underlying dynamics is noisy.