 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Lane Detection from Continuous Driving Scenes Using Deep Neural Networks
Paper and Code

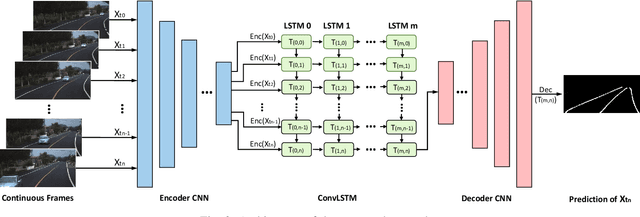


Lane detection in driving scenes is an important module for autonomous vehicles and advanced driver assistance systems. In recent years, many sophisticated lane detection methods have been proposed. However, most methods focus on detecting the lane from one single image, and often lead to unsatisfactory performance in handling some extremely-bad situations such as heavy shadow, severe mark degradation, serious vehicle occlusion, and so on. In fact, lanes are continuous line structures on the road. Consequently, the lane that cannot be accurately detected in one current frame may potentially be inferred out by incorporating information of previous frames. To this end, we investigate lane detection by using multiple frames of a continuous driving scene, and propose a hybrid deep architecture by combining the convolutional neural network (CNN) and the recurrent neural network (RNN). Specifically, information of each frame is abstracted by a CNN block, and the CNN features of multiple continuous frames, holding the property of time-series, are then fed into the RNN block for feature learning and lane prediction. Extensive experiments on two large-scale datasets demonstrate that, the proposed method outperforms the competing methods in lane detection, especially in handling difficult situations.