 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust 3D Human Motion Reconstruction Via Dynamic Template Construction
Paper and Code
Jan 31, 2018
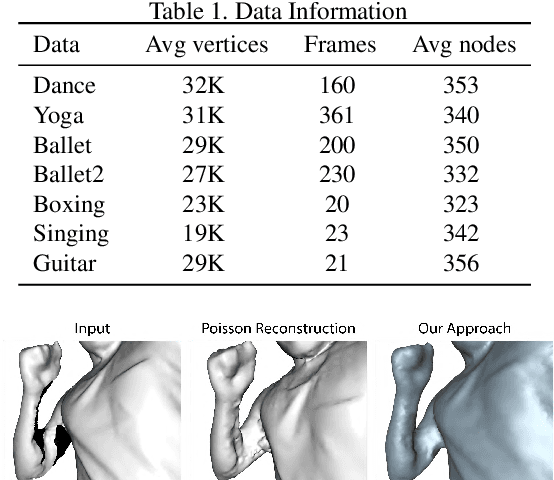

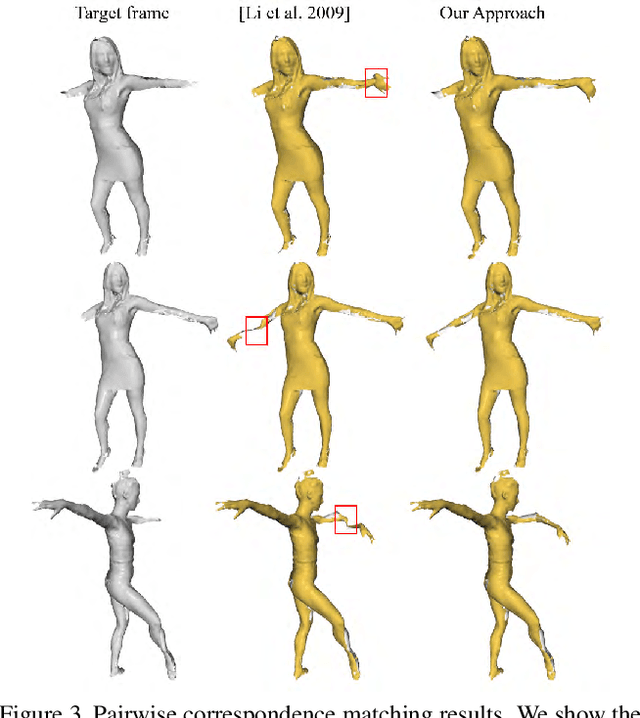
In multi-view human body capture systems, the recovered 3D geometry or even the acquired imagery data can be heavily corrupted due to occlusions, noise, limited field of- view, etc. Direct estimation of 3D pose, body shape or motion on these low-quality data has been traditionally challenging.In this paper, we present a graph-based non-rigid shape registration framework that can simultaneously recover 3D human body geometry and estimate pose/motion at high fidelity.Our approach first generates a global full-body template by registering all poses in the acquired motion sequence.We then construct a deformable graph by utilizing the rigid components in the global template. We directly warp the global template graph back to each motion frame in order to fill in missing geometry. Specifically, we combine local rigidity and temporal coherence constraints to maintain geometry and motion consistencies. Comprehensive experiments on various scenes show that our method is accurate and robust even in the presence of drastic motions.