 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoadBEV: Road Surface Reconstruction in Bird's Eye View
Paper and Code


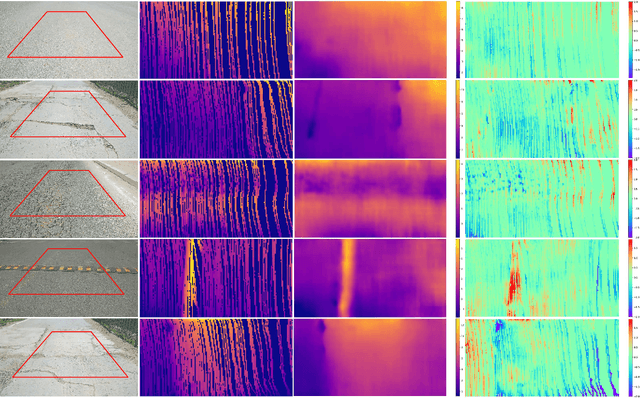

Road surface conditions, especially geometry profiles, enormously affect driving performance of autonomous vehicles. Vision-based online road reconstruction promisingly captures road information in advance. Existing solutions like monocular depth estimation and stereo matching suffer from modest performance. The recent technique of Bird's-Eye-View (BEV) perception provides immense potential to more reliable and accurate reconstruction. This paper uniformly proposes two simple yet effective models for road elevation reconstruction in BEV named RoadBEV-mono and RoadBEV-stereo, which estimate road elevation with monocular and stereo images, respectively. The former directly fits elevation values based on voxel features queried from image view, while the latter efficiently recognizes road elevation patterns based on BEV volume representing discrepancy between left and right voxel features. Insightful analyses reveal their consistence and difference with perspective view. Experiments on real-world dataset verify the models' effectiveness and superiority. Elevation errors of RoadBEV-mono and RoadBEV-stereo achieve 1.83cm and 0.56cm, respectively. The estimation performance improves by 50\% in BEV based on monocular image. Our models are promising for practical applications, providing valuable references for vision-based BEV perception in autonomous driving. The code is released at https://github.com/ztsrxh/RoadBEV.