 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRNGDet: Road Network Graph Detection by Transformer in Aerial Images
Paper and Code
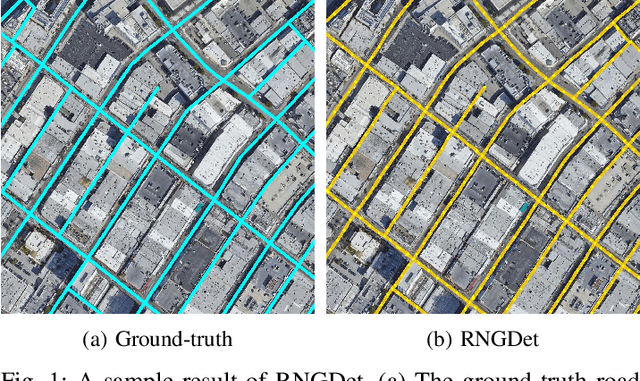
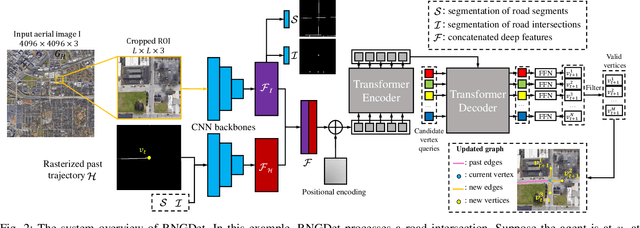
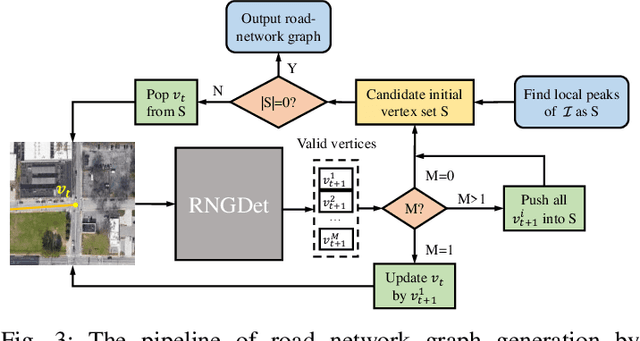
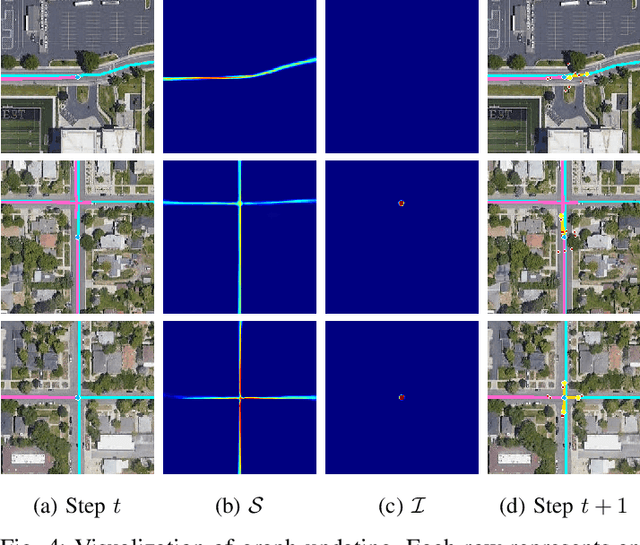
Road network graphs provide critical information for autonomous vehicle applications, such as motion planning on drivable areas. However, manually annotating road network graphs is inefficient and labor-intensive. Automatically detecting road network graphs could alleviate this issue, but existing works are either segmentation-based approaches that could not ensure satisfactory topology correctness, or graph-based approaches that could not present precise enough detection results. To provide a solution to these problems, we propose a novel approach based on transformer and imitation learning named RNGDet (\underline{R}oad \underline{N}etwork \underline{G}raph \underline{Det}ection by Transformer) in this paper. In view of that high-resolution aerial images could be easily accessed all over the world nowadays, we make use of aerial images in our approach. Taken as input an aerial image, our approach iteratively generates road network graphs vertex-by-vertex. Our approach can handle complicated intersection points of various numbers of road segments. We evaluate our approach on a publicly available dataset. The superiority of our approach is demonstrated through the comparative experiments.