 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRL-GSBridge: 3D Gaussian Splatting Based Real2Sim2Real Method for Robotic Manipulation Learning
Paper and Code
Sep 30, 2024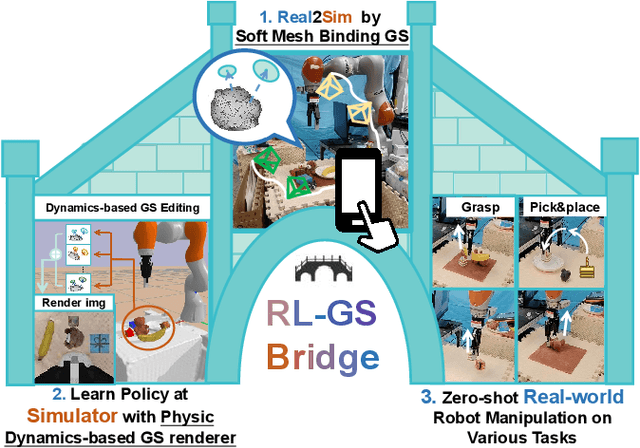
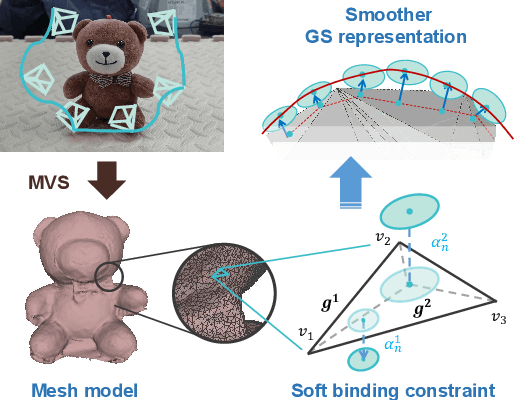
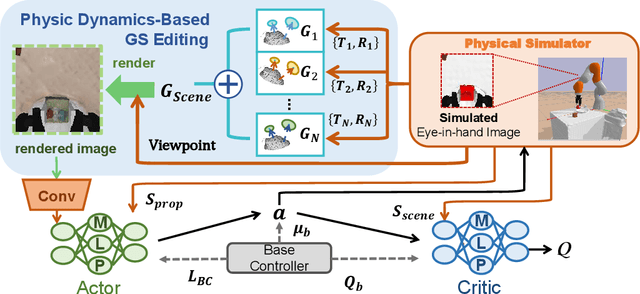

Sim-to-Real refers to the process of transferring policies learned in simulation to the real world, which is crucial for achieving practical robotics applications. However, recent Sim2real methods either rely on a large amount of augmented data or large learning models, which is inefficient for specific tasks. In recent years, radiance field-based reconstruction methods, especially the emergence of 3D Gaussian Splatting, making it possible to reproduce realistic real-world scenarios. To this end, we propose a novel real-to-sim-to-real reinforcement learning framework, RL-GSBridge, which introduces a mesh-based 3D Gaussian Splatting method to realize zero-shot sim-to-real transfer for vision-based deep reinforcement learning. We improve the mesh-based 3D GS modeling method by using soft binding constraints, enhancing the rendering quality of mesh models. We then employ a GS editing approach to synchronize rendering with the physics simulator, reflecting the interactions of the physical robot more accurately. Through a series of sim-to-real robotic arm experiments, including grasping and pick-and-place tasks, we demonstrate that RL-GSBridge maintains a satisfactory success rate in real-world task completion during sim-to-real transfer. Furthermore, a series of rendering metrics and visualization results indicate that our proposed mesh-based 3D Gaussian reduces artifacts in unstructured objects, demonstrating more realistic rendering performance.