 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRGBGrasp: Image-based Object Grasping by Capturing Multiple Views during Robot Arm Movement with Neural Radiance Fields
Paper and Code
Nov 28, 2023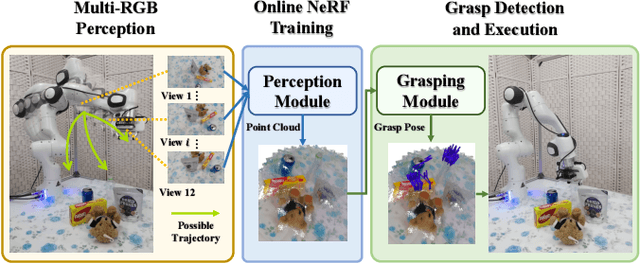
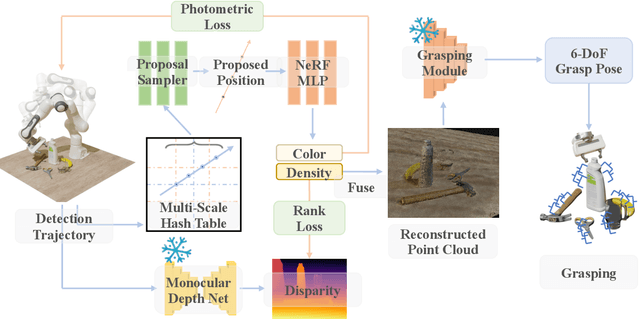
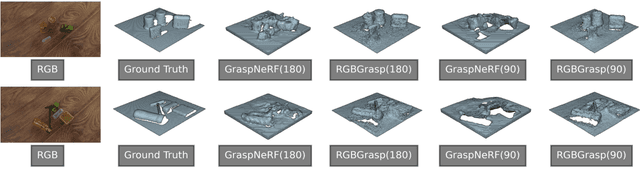

Robotic research encounters a significant hurdle when it comes to the intricate task of grasping objects that come in various shapes, materials, and textures. Unlike many prior investigations that heavily leaned on specialized point-cloud cameras or abundant RGB visual data to gather 3D insights for object-grasping missions, this paper introduces a pioneering approach called RGBGrasp. This method depends on a limited set of RGB views to perceive the 3D surroundings containing transparent and specular objects and achieve accurate grasping. Our method utilizes pre-trained depth prediction models to establish geometry constraints, enabling precise 3D structure estimation, even under limited view conditions. Finally, we integrate hash encoding and a proposal sampler strategy to significantly accelerate the 3D reconstruction process. These innovations significantly enhance the adaptability and effectiveness of our algorithm in real-world scenarios. Through comprehensive experimental validation, we demonstrate that RGBGrasp achieves remarkable success across a wide spectrum of object-grasping scenarios, establishing it as a promising solution for real-world robotic manipulation tasks. The demo of our method can be found on: https://sites.google.com/view/rgbgrasp