 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReverse Curriculum Generation for Reinforcement Learning
Paper and Code
Jul 23, 2018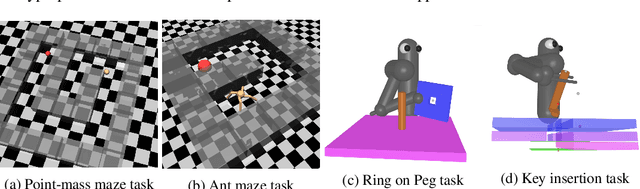
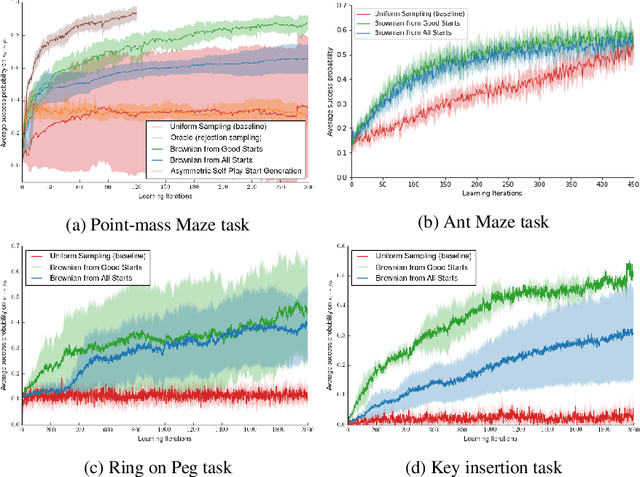
Many relevant tasks require an agent to reach a certain state, or to manipulate objects into a desired configuration. For example, we might want a robot to align and assemble a gear onto an axle or insert and turn a key in a lock. These goal-oriented tasks present a considerable challenge for reinforcement learning, since their natural reward function is sparse and prohibitive amounts of exploration are required to reach the goal and receive some learning signal. Past approaches tackle these problems by exploiting expert demonstrations or by manually designing a task-specific reward shaping function to guide the learning agent. Instead, we propose a method to learn these tasks without requiring any prior knowledge other than obtaining a single state in which the task is achieved. The robot is trained in reverse, gradually learning to reach the goal from a set of start states increasingly far from the goal. Our method automatically generates a curriculum of start states that adapts to the agent's performance, leading to efficient training on goal-oriented tasks. We demonstrate our approach on difficult simulated navigation and fine-grained manipulation problems, not solvable by state-of-the-art reinforcement learning methods.