 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegret Bounds for Robust Adaptive Control of the Linear Quadratic Regulator
Paper and Code
May 23, 2018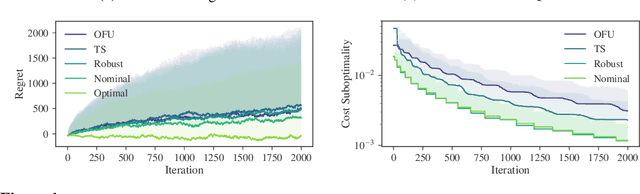
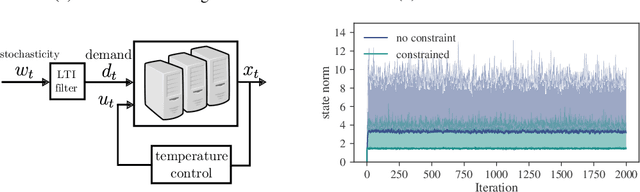
We consider adaptive control of the Linear Quadratic Regulator (LQR), where an unknown linear system is controlled subject to quadratic costs. Leveraging recent developments in the estimation of linear systems and in robust controller synthesis, we present the first provably polynomial time algorithm that provides high probability guarantees of sub-linear regret on this problem. We further study the interplay between regret minimization and parameter estimation by proving a lower bound on the expected regret in terms of the exploration schedule used by any algorithm. Finally, we conduct a numerical study comparing our robust adaptive algorithm to other methods from the adaptive LQR literature, and demonstrate the flexibility of our proposed method by extending it to a demand forecasting problem subject to state constraints.