 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-World Robot Learning with Masked Visual Pre-training
Paper and Code
Oct 06, 2022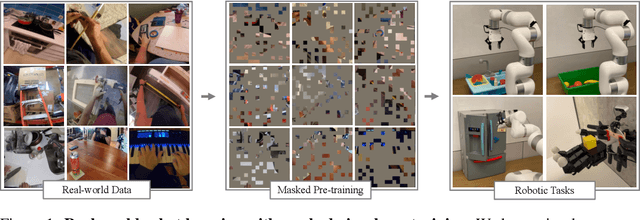
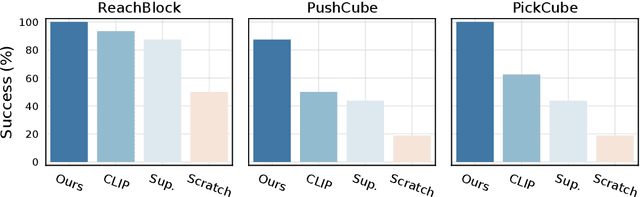
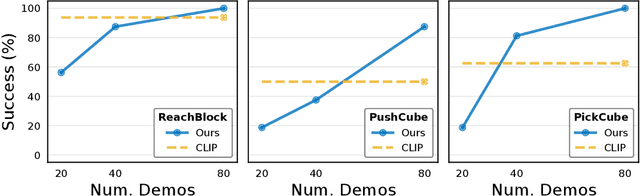
In this work, we explore self-supervised visual pre-training on images from diverse, in-the-wild videos for real-world robotic tasks. Like prior work, our visual representations are pre-trained via a masked autoencoder (MAE), frozen, and then passed into a learnable control module. Unlike prior work, we show that the pre-trained representations are effective across a range of real-world robotic tasks and embodiments. We find that our encoder consistently outperforms CLIP (up to 75%), supervised ImageNet pre-training (up to 81%), and training from scratch (up to 81%). Finally, we train a 307M parameter vision transformer on a massive collection of 4.5M images from the Internet and egocentric videos, and demonstrate clearly the benefits of scaling visual pre-training for robot learning.