 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRD-VIO: Robust Visual-Inertial Odometry for Mobile Augmented Reality in Dynamic Environments
Paper and Code

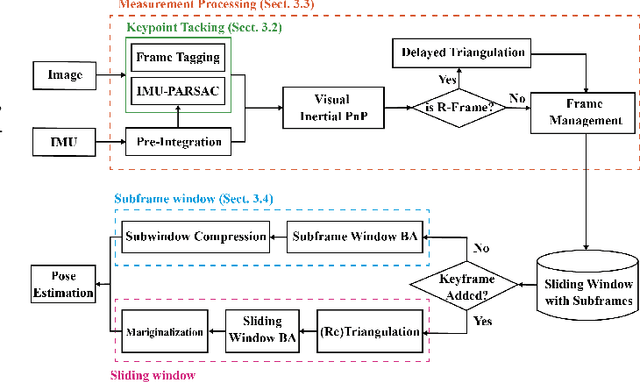

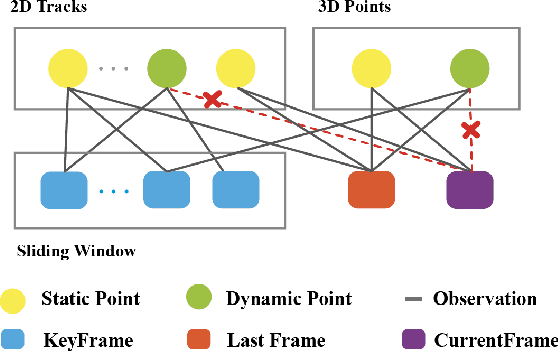
It is typically challenging for visual or visual-inertial odometry systems to handle the problems of dynamic scenes and pure rotation. In this work, we design a novel visual-inertial odometry (VIO) system called RD-VIO to handle both of these two problems. Firstly, we propose an IMU-PARSAC algorithm which can robustly detect and match keypoints in a two-stage process. In the first state, landmarks are matched with new keypoints using visual and IMU measurements. We collect statistical information from the matching and then guide the intra-keypoint matching in the second stage. Secondly, to handle the problem of pure rotation, we detect the motion type and adapt the deferred-triangulation technique during the data-association process. We make the pure-rotational frames into the special subframes. When solving the visual-inertial bundle adjustment, they provide additional constraints to the pure-rotational motion. We evaluate the proposed VIO system on public datasets. Experiments show the proposed RD-VIO has obvious advantages over other methods in dynamic environments.