 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRAMP: A Risk-Aware Mapping and Planning Pipeline for Fast Off-Road Ground Robot Navigation
Paper and Code
Oct 12, 2022
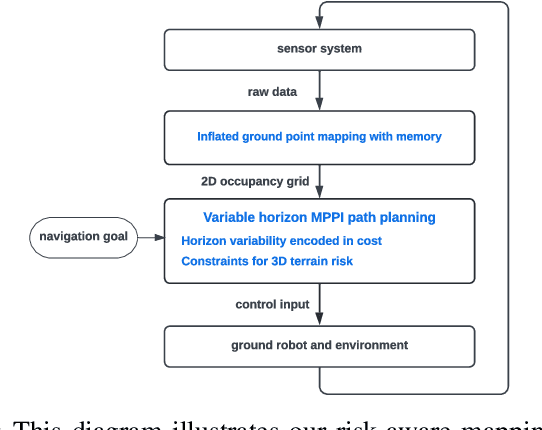
A key challenge in fast ground robot navigation in 3D terrain is balancing robot speed and safety. Recent work has shown that 2.5D maps (2D representations with additional 3D information) are ideal for real-time safe and fast planning. However, raytracing as a prevalent method of generating occupancy grid as the base 2D representation makes the generated map unsafe to plan in, due to inaccurate representation of unknown space. Additionally, existing planners such as MPPI do not reason about speeds in known free and unknown space separately, leading to slow plans. This work therefore first presents ground point inflation as a way to generate accurate occupancy grid maps from classified pointclouds. Then we present an MPPI-based planner with embedded variability in horizon, to maximize speed in known free space while retaining cautionary penetration into unknown space. Finally, we integrate this mapping and planning pipeline with risk constraints arising from 3D terrain, and verify that it enables fast and safe navigation using simulations and a hardware demonstration.