 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrompting Decision Transformer for Few-Shot Policy Generalization
Paper and Code
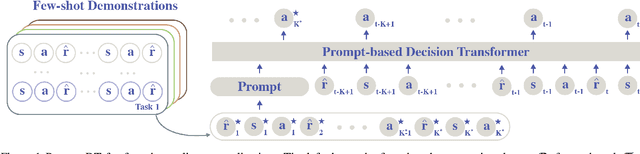
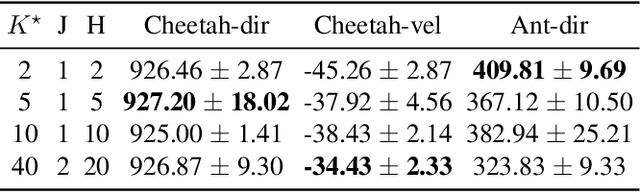
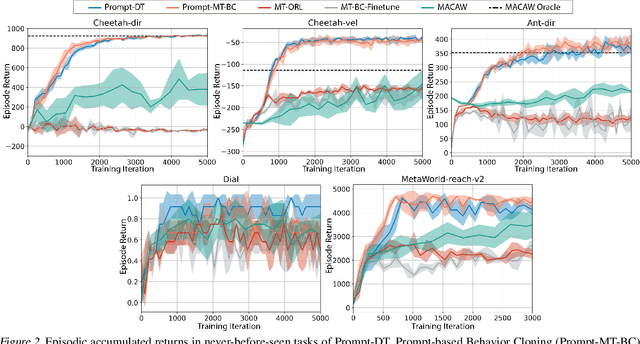
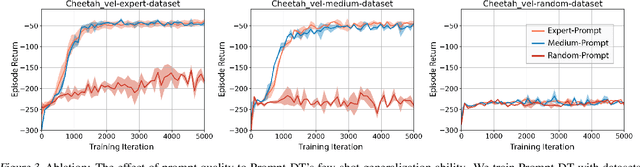
Humans can leverage prior experience and learn novel tasks from a handful of demonstrations. In contrast to offline meta-reinforcement learning, which aims to achieve quick adaptation through better algorithm design, we investigate the effect of architecture inductive bias on the few-shot learning capability. We propose a Prompt-based Decision Transformer (Prompt-DT), which leverages the sequential modeling ability of the Transformer architecture and the prompt framework to achieve few-shot adaptation in offline RL. We design the trajectory prompt, which contains segments of the few-shot demonstrations, and encodes task-specific information to guide policy generation. Our experiments in five MuJoCo control benchmarks show that Prompt-DT is a strong few-shot learner without any extra finetuning on unseen target tasks. Prompt-DT outperforms its variants and strong meta offline RL baselines by a large margin with a trajectory prompt containing only a few timesteps. Prompt-DT is also robust to prompt length changes and can generalize to out-of-distribution (OOD) environments.