 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePROFIT: A Specialized Optimizer for Deep Fine Tuning
Paper and Code
Dec 09, 2024
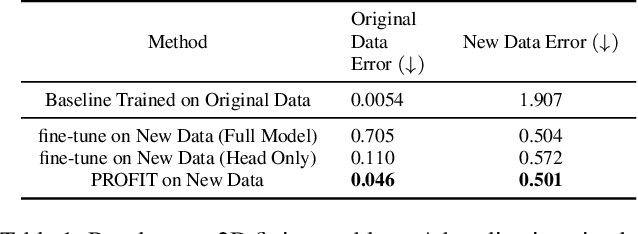
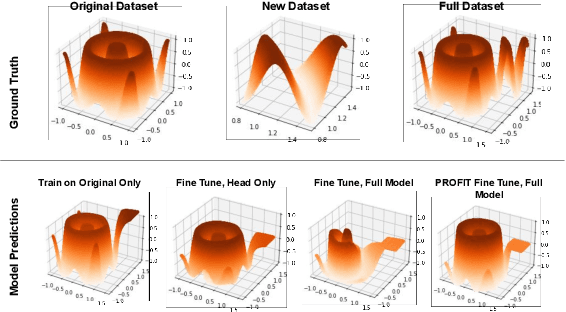
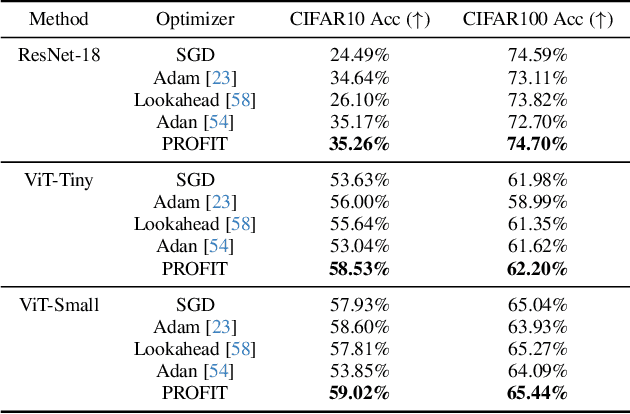
Fine-tuning pre-trained models has become invaluable in computer vision and robotics. Recent fine-tuning approaches focus on improving efficiency rather than accuracy by using a mixture of smaller learning rates or frozen backbones. To return the spotlight to model accuracy, we present PROFIT (Proximally Restricted Optimizer For Iterative Training), one of the first optimizers specifically designed for incrementally fine-tuning converged models on new tasks or datasets. Unlike traditional optimizers such as SGD or Adam, which make minimal assumptions due to random initialization, PROFIT leverages the structure of a converged model to regularize the optimization process, leading to improved results. By employing a simple temporal gradient orthogonalization process, PROFIT outperforms traditional fine-tuning methods across various tasks: image classification, representation learning, and large-scale motion prediction. Moreover, PROFIT is encapsulated within the optimizer logic, making it easily integrated into any training pipeline with minimal engineering effort. A new class of fine-tuning optimizers like PROFIT can drive advancements as fine-tuning and incremental training become increasingly prevalent, reducing reliance on costly model training from scratch.