 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Unobserved Space For Planning via Depth Map Augmentation
Paper and Code
Nov 13, 2019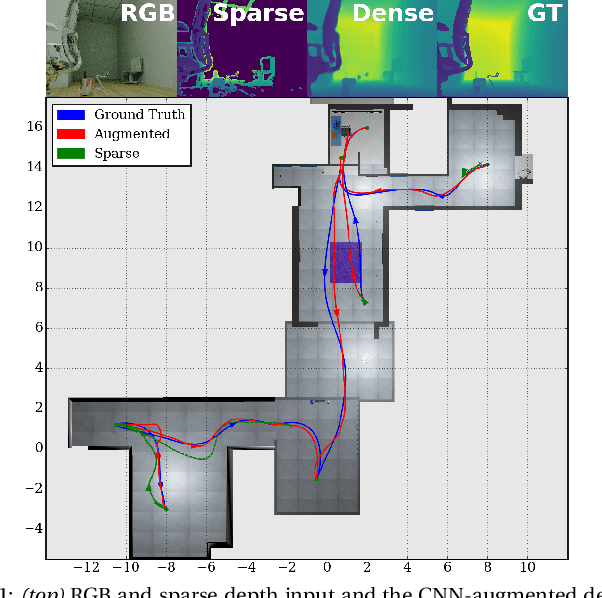
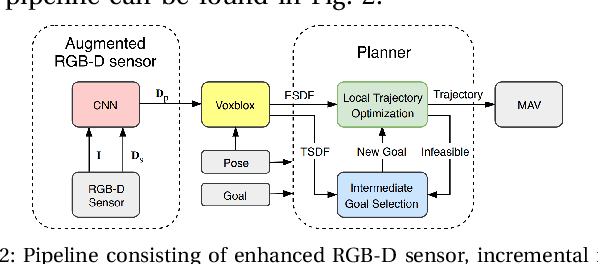
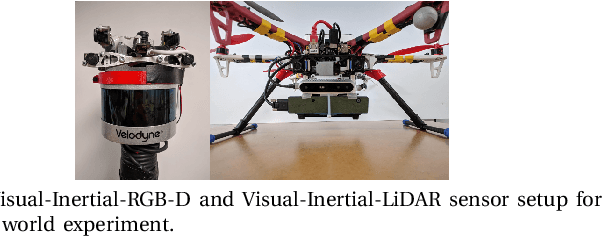
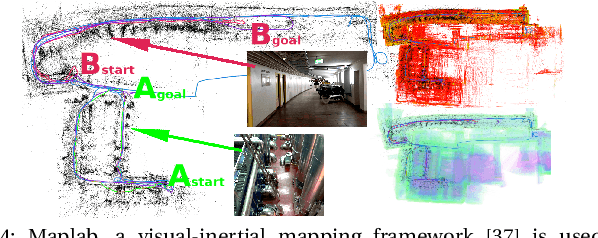
Safe and efficient path planning is crucial for autonomous mobile robots. A prerequisite for path planning is to have a comprehensive understanding of the 3D structure of the robot's environment. On MAVs this is commonly achieved using low-cost sensors, such as stereo or RGB-D cameras. These sensors may fail to provide depth measurements in textureless or IR-absorbing areas and have limited effective range. In path planning, this results in inefficient trajectories or failure to recognize a feasible path to the goal, hence significantly impairing the robot's mobility. Recent advances in deep learning enables us to exploit prior experience about the shape of the world and hence to infer complete depth maps from color images and additional sparse depth measurements. In this work, we present an augmented planning system and investigate the effects of employing state-of-the-art depth completion techniques, specifically trained to augment sparse depth maps originating from RGB-D sensors, semi-dense methods and stereo matchers. We extensively evaluate our approach in online path planning experiments based on simulated data, as well as global path planning experiments based on real world MAV data. We show that our augmented system, provided with only sparse depth perception, can reach on-par performance to ground truth depth input in simulated online planning experiments. On real world MAV data the augmented system demonstrates superior performance compared to a planner based on very dense RGB-D depth maps.