 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePre-Trained Language Models for Interactive Decision-Making
Paper and Code
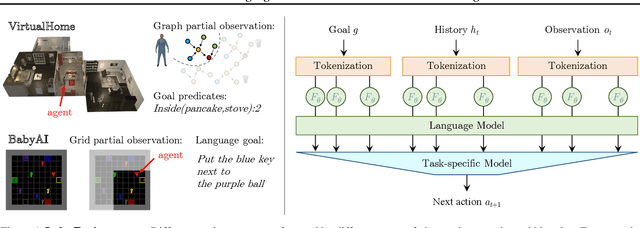
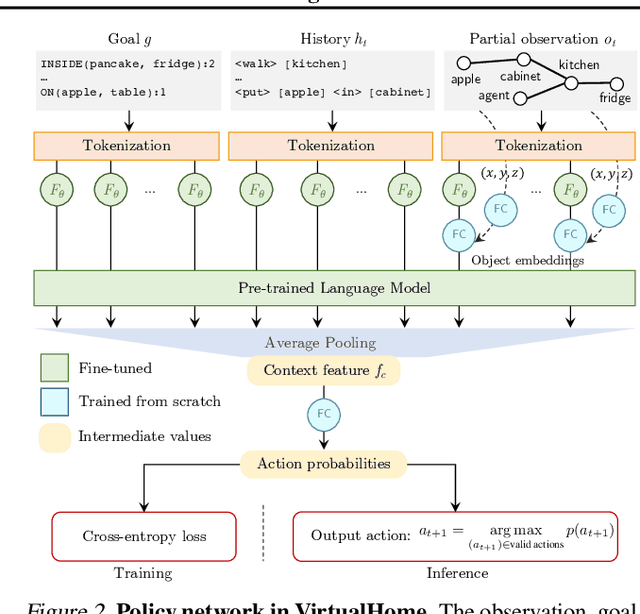
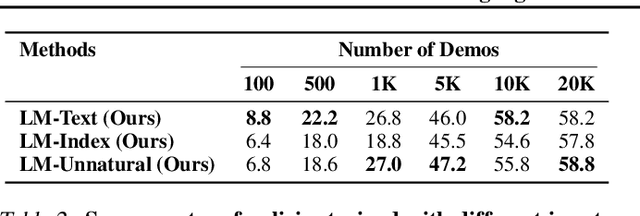
Language model (LM) pre-training has proven useful for a wide variety of language processing tasks, but can such pre-training be leveraged for more general machine learning problems? We investigate the effectiveness of language modeling to scaffold learning and generalization in autonomous decision-making. We describe a framework for imitation learning in which goals and observations are represented as a sequence of embeddings, and translated into actions using a policy network initialized with a pre-trained transformer LM. We demonstrate that this framework enables effective combinatorial generalization across different environments, such as VirtualHome and BabyAI. In particular, for test tasks involving novel goals or novel scenes, initializing policies with language models improves task completion rates by 43.6% in VirtualHome. We hypothesize and investigate three possible factors underlying the effectiveness of LM-based policy initialization. We find that sequential representations (vs. fixed-dimensional feature vectors) and the LM objective (not just the transformer architecture) are both important for generalization. Surprisingly, however, the format of the policy inputs encoding (e.g. as a natural language string vs. an arbitrary sequential encoding) has little influence. Together, these results suggest that language modeling induces representations that are useful for modeling not just language, but also goals and plans; these representations can aid learning and generalization even outside of language processing.