 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolarMix: A General Data Augmentation Technique for LiDAR Point Clouds
Paper and Code
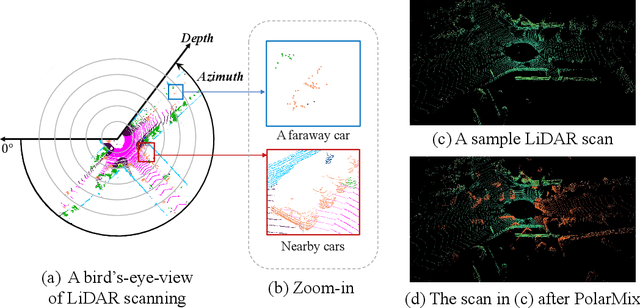
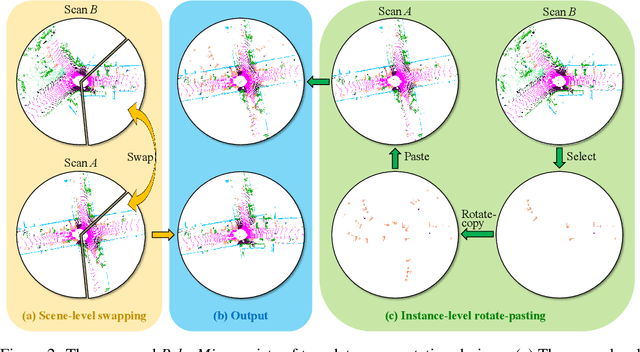

LiDAR point clouds, which are usually scanned by rotating LiDAR sensors continuously, capture precise geometry of the surrounding environment and are crucial to many autonomous detection and navigation tasks. Though many 3D deep architectures have been developed, efficient collection and annotation of large amounts of point clouds remain one major challenge in the analytic and understanding of point cloud data. This paper presents PolarMix, a point cloud augmentation technique that is simple and generic but can mitigate the data constraint effectively across different perception tasks and scenarios. PolarMix enriches point cloud distributions and preserves point cloud fidelity via two cross-scan augmentation strategies that cut, edit, and mix point clouds along the scanning direction. The first is scene-level swapping which exchanges point cloud sectors of two LiDAR scans that are cut along the azimuth axis. The second is instance-level rotation and paste which crops point instances from one LiDAR scan, rotates them by multiple angles (to create multiple copies), and paste the rotated point instances into other scans. Extensive experiments show that PolarMix achieves superior performance consistently across different perception tasks and scenarios. In addition, it can work as plug-and-play for various 3D deep architectures and also performs well for unsupervised domain adaptation.