 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePointFix: Learning to Fix Domain Bias for Robust Online Stereo Adaptation
Paper and Code
Jul 27, 2022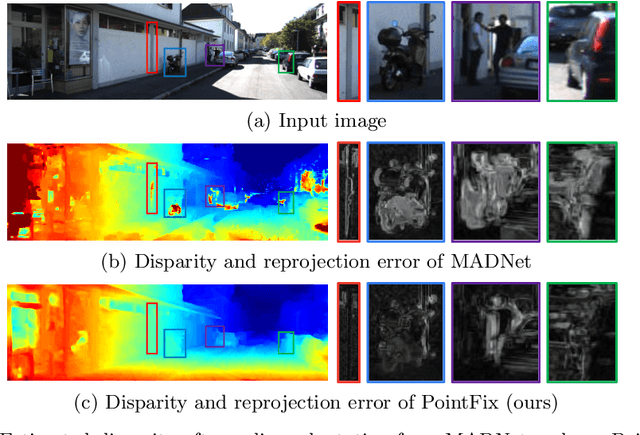
Online stereo adaptation tackles the domain shift problem, caused by different environments between synthetic (training) and real (test) datasets, to promptly adapt stereo models in dynamic real-world applications such as autonomous driving. However, previous methods often fail to counteract particular regions related to dynamic objects with more severe environmental changes. To mitigate this issue, we propose to incorporate an auxiliary point-selective network into a meta-learning framework, called PointFix, to provide a robust initialization of stereo models for online stereo adaptation. In a nutshell, our auxiliary network learns to fix local variants intensively by effectively back-propagating local information through the meta-gradient for the robust initialization of the baseline model. This network is model-agnostic, so can be used in any kind of architectures in a plug-and-play manner. We conduct extensive experiments to verify the effectiveness of our method under three adaptation settings such as short-, mid-, and long-term sequences. Experimental results show that the proper initialization of the base stereo model by the auxiliary network enables our learning paradigm to achieve state-of-the-art performance at inference.