 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoint-In-Context: Understanding Point Cloud via In-Context Learning
Paper and Code
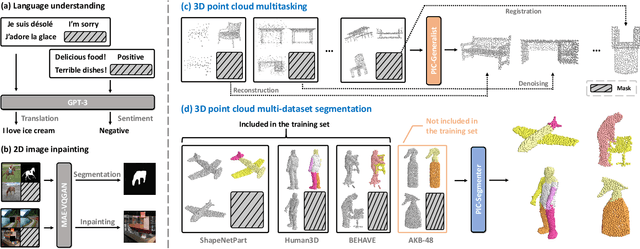
With the emergence of large-scale models trained on diverse datasets, in-context learning has emerged as a promising paradigm for multitasking, notably in natural language processing and image processing. However, its application in 3D point cloud tasks remains largely unexplored. In this work, we introduce Point-In-Context (PIC), a novel framework for 3D point cloud understanding via in-context learning. We address the technical challenge of effectively extending masked point modeling to 3D point clouds by introducing a Joint Sampling module and proposing a vanilla version of PIC called Point-In-Context-Generalist (PIC-G). PIC-G is designed as a generalist model for various 3D point cloud tasks, with inputs and outputs modeled as coordinates. In this paradigm, the challenging segmentation task is achieved by assigning label points with XYZ coordinates for each category; the final prediction is then chosen based on the label point closest to the predictions. To break the limitation by the fixed label-coordinate assignment, which has poor generalization upon novel classes, we propose two novel training strategies, In-Context Labeling and In-Context Enhancing, forming an extended version of PIC named Point-In-Context-Segmenter (PIC-S), targeting improving dynamic context labeling and model training. By utilizing dynamic in-context labels and extra in-context pairs, PIC-S achieves enhanced performance and generalization capability in and across part segmentation datasets. PIC is a general framework so that other tasks or datasets can be seamlessly introduced into our PIC through a unified data format. We conduct extensive experiments to validate the versatility and adaptability of our proposed methods in handling a wide range of tasks and segmenting multi-datasets. Our PIC-S is capable of generalizing unseen datasets and performing novel part segmentation by customizing prompts.