 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlacing by Touching: An empirical study on the importance of tactile sensing for precise object placing
Paper and Code
Oct 05, 2022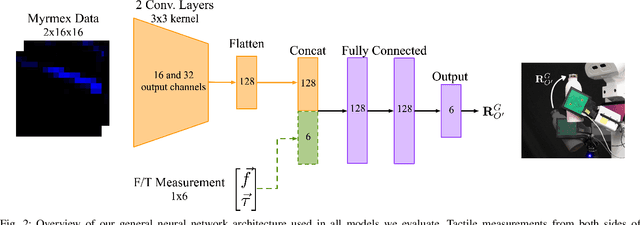
Tactile sensors are promising tools for endowing robots with embodied intelligence and increased dexterity. These sensors can provide robotic systems with direct information about physical interactions with the world, which is difficult to obtain from extrinsic perception systems. This work deals with a practical everyday living problem: stable object placement on flat surfaces starting from unknown initial poses. Common approaches for object placing either require complete scene specifications or indirect sensor measurements, such as cameras which are prone to suffer from occlusions. Instead, this work proposes a novel approach for stable object placing that combines tactile feedback and proprioceptive sensing. We devise a neural architecture that estimates a rotation matrix which results in a corrective gripper movement that aligns the object with the table and paves the way for the subsequent stable object placement. We compare models with different sensing modalities, such as force-torque and an external motion capture system, in real-world object placement tasks with different objects. Our experimental evaluation of the placing policies with a set of unknown everyday objects reveals an impressive generalization of the tactile-based pipeline and suggests that tactile sensing plays a vital role in the intrinsic understanding of dexterous object manipulation. Videos of our approach are available at https://sites.google.com/view/placing-by-touching.