 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics-Guided Hierarchical Reward Mechanism for LearningBased Multi-Finger Object Grasping
Paper and Code
May 26, 2022
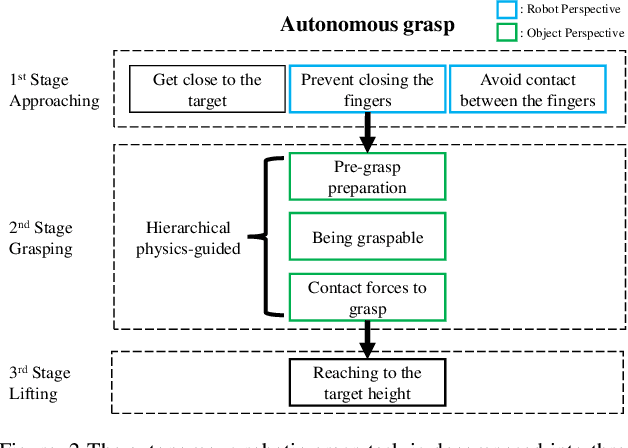
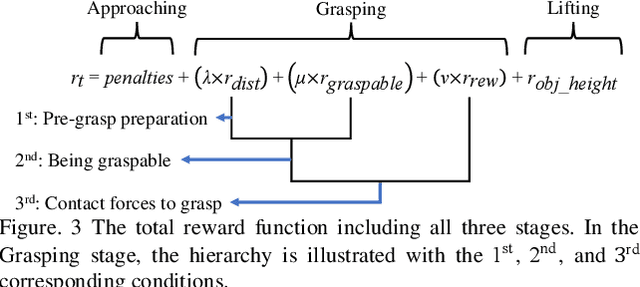
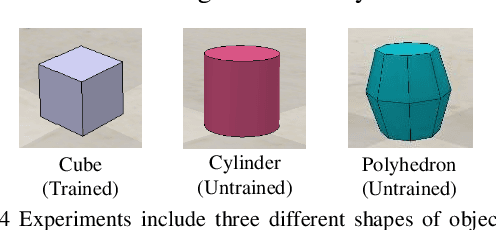
Autonomous grasping is challenging due to the high computational cost caused by multi-fingered robotic hands and their interactions with objects. Various analytical methods have been developed yet their high computational cost limits the adoption in real-world applications. Learning-based grasping can afford real-time motion planning thanks to its high computational efficiency. However, it needs to explore large search spaces during its learning process. The search space causes low learning efficiency, which has been the main barrier to its practical adoption. In this work, we develop a novel Physics-Guided Deep Reinforcement Learning with a Hierarchical Reward Mechanism, which combines the benefits of both analytical methods and learning-based methods for autonomous grasping. Different from conventional observation-based grasp learning, physics-informed metrics are utilized to convey correlations between features associated with hand structures and objects to improve learning efficiency and learning outcomes. Further, a hierarchical reward mechanism is developed to enable the robot to learn the grasping task in a prioritized way. It is validated in a grasping task with a MICO robot arm in simulation and physical experiments. The results show that our method outperformed the baseline in task performance by 48% and learning efficiency by 40%.