 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerception-aware Path Planning
Paper and Code
Feb 10, 2017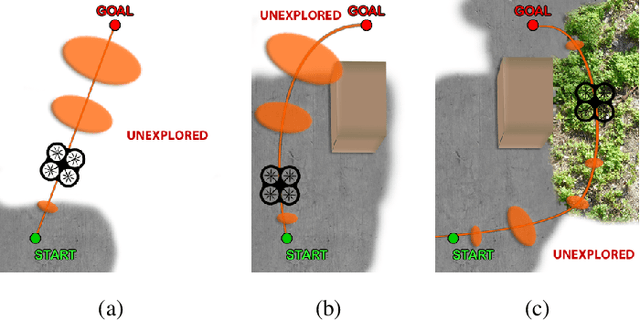
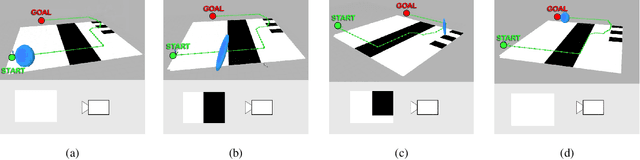
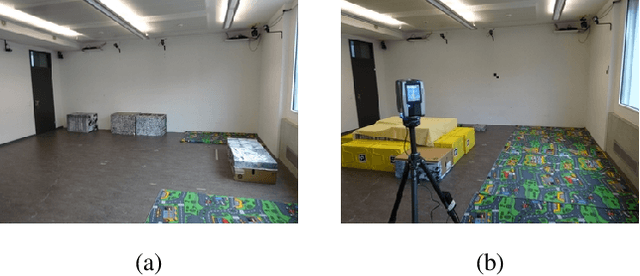
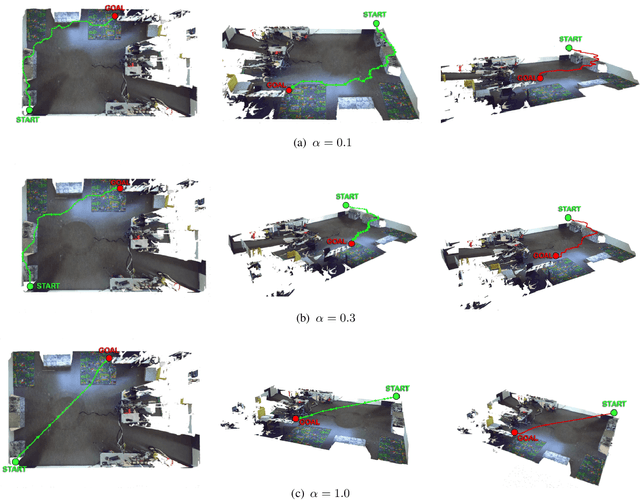
In this paper, we give a double twist to the problem of planning under uncertainty. State-of-the-art planners seek to minimize the localization uncertainty by only considering the geometric structure of the scene. In this paper, we argue that motion planning for vision-controlled robots should be perception aware in that the robot should also favor texture-rich areas to minimize the localization uncertainty during a goal-reaching task. Thus, we describe how to optimally incorporate the photometric information (i.e., texture) of the scene, in addition to the the geometric one, to compute the uncertainty of vision-based localization during path planning. To avoid the caveats of feature-based localization systems (i.e., dependence on feature type and user-defined thresholds), we use dense, direct methods. This allows us to compute the localization uncertainty directly from the intensity values of every pixel in the image. We also describe how to compute trajectories online, considering also scenarios with no prior knowledge about the map. The proposed framework is general and can easily be adapted to different robotic platforms and scenarios. The effectiveness of our approach is demonstrated with extensive experiments in both simulated and real-world environments using a vision-controlled micro aerial vehicle.