 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePeeking into occluded joints: A novel framework for crowd pose estimation
Paper and Code



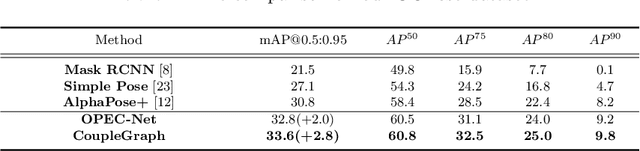
Although occlusion widely exists in nature and remains a fundamental challenge for pose estimation, existing heatmap-based approaches suffer serious degradation on occlusions. Their intrinsic problem is that they directly localize the joints based on visual information; however, the invisible joints are lack of that. In contrast to localization, our framework estimates the invisible joints from an inference perspective by proposing an Image-Guided Progressive GCN module which provides a comprehensive understanding of both image context and pose structure. Moreover, existing benchmarks contain limited occlusions for evaluation. Therefore, we thoroughly pursue this problem and propose a novel OPEC-Net framework together with a new Occluded Pose (OCPose) dataset with 9k annotated images. Extensive quantitative and qualitative evaluations on benchmarks demonstrate that OPEC-Net achieves significant improvements over recent leading works. Notably, our OCPose is the most complex occlusion dataset with respect to average IoU between adjacent instances. Source code and OCPose will be publicly available.