Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOrientation-Discriminative Feature Representation for Decentralized Pedestrian Tracking
Paper and Code
Feb 26, 2022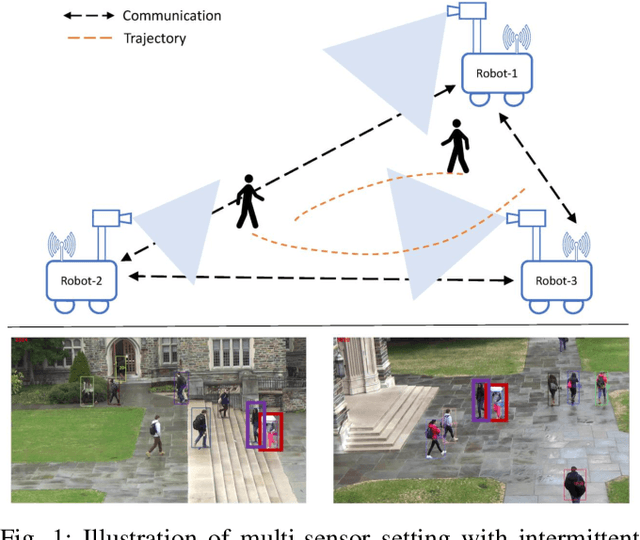
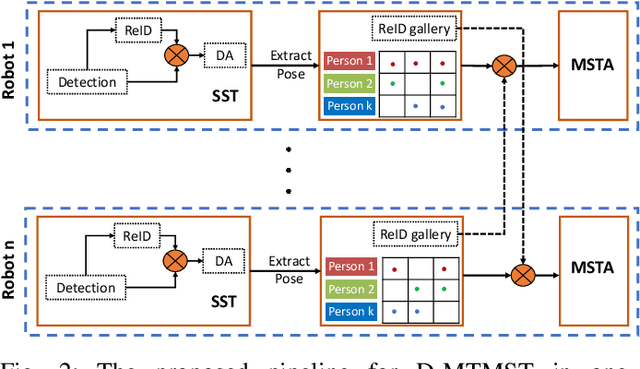
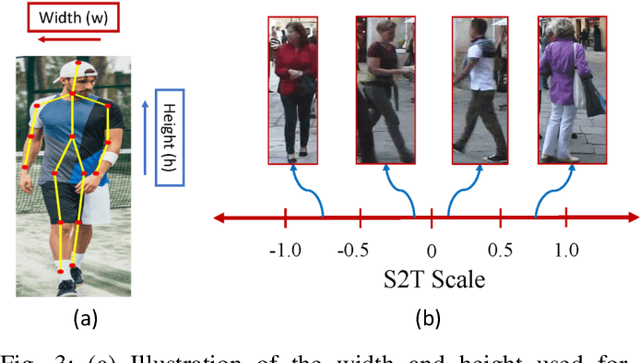
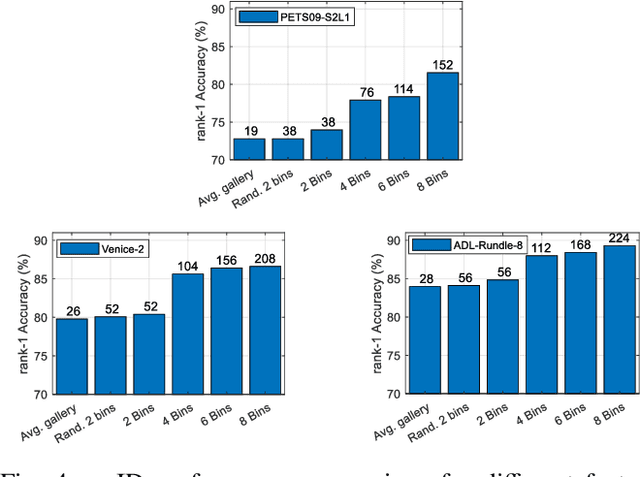
This paper focuses on the problem of decentralized pedestrian tracking using a sensor network. Traditional works on pedestrian tracking usually use a centralized framework, which becomes less practical for robotic applications due to limited communication bandwidth. Our paper proposes a communication-efficient, orientation-discriminative feature representation to characterize pedestrian appearance information, that can be shared among sensors. Building upon that representation, our work develops a cross-sensor track association approach to achieve decentralized tracking. Extensive evaluations are conducted on publicly available datasets and results show that our proposed approach leads to improved performance in multi-sensor tracking.
* 8 pages, 4 figures, submitted to IEEE/RSJ International Conference on
Intelligent Robots and Systems
View paper on