 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenStereo: A Comprehensive Benchmark for Stereo Matching and Strong Baseline
Paper and Code
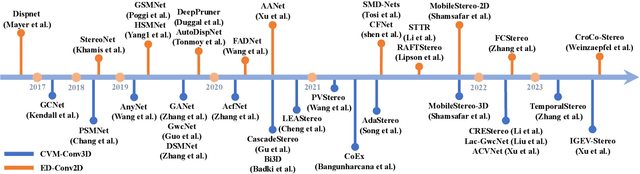
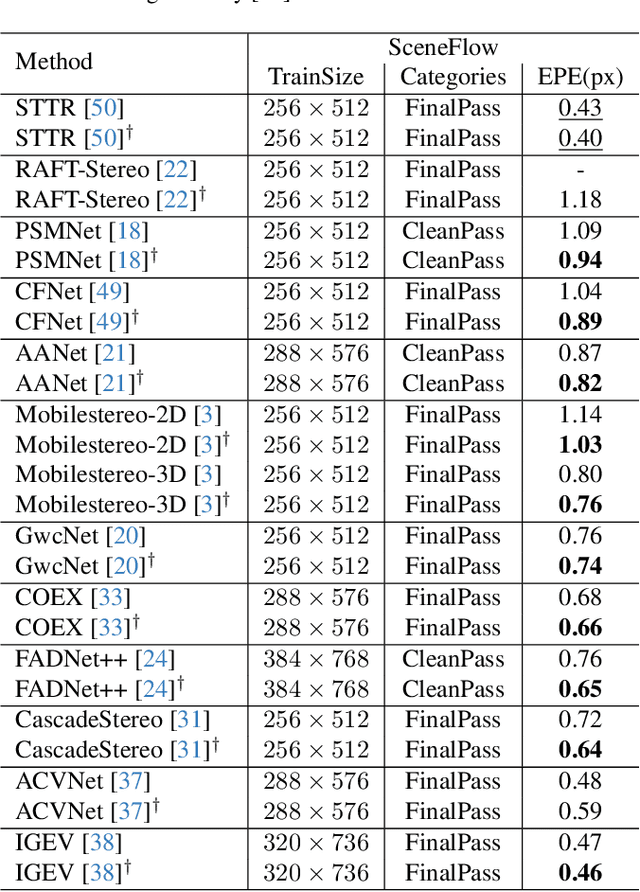
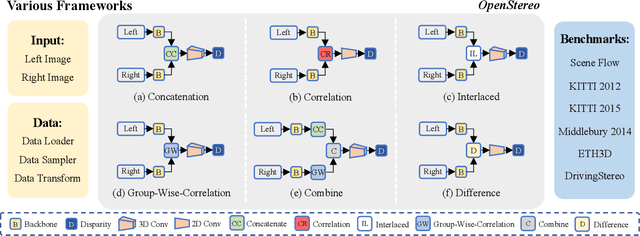
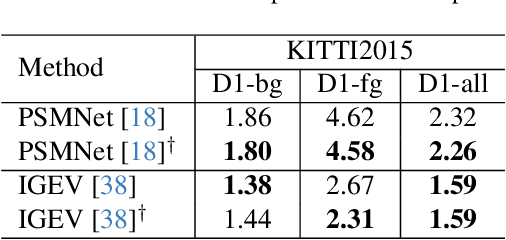
Stereo matching, a pivotal technique in computer vision, plays a crucial role in robotics, autonomous navigation, and augmented reality. Despite the development of numerous impressive methods in recent years, replicating their results and determining the most suitable architecture for practical application remains challenging. Addressing this gap, our paper introduces a comprehensive benchmark focusing on practical applicability rather than solely on performance enhancement. Specifically, we develop a flexible and efficient stereo matching codebase, called OpenStereo. OpenStereo includes training and inference codes of more than 12 network models, making it, to our knowledge, the most complete stereo matching toolbox available. Based on OpenStereo, we conducted experiments on the SceneFlow dataset and have achieved or surpassed the performance metrics reported in the original paper. Additionally, we conduct an in-depth revisitation of recent developments in stereo matching through ablative experiments. These investigations inspired the creation of StereoBase, a simple yet strong baseline model. Our extensive comparative analyses of StereoBase against numerous contemporary stereo matching methods on the SceneFlow dataset demonstrate its remarkably strong performance. The source code is available at https://github.com/XiandaGuo/OpenStereo.