 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Replanning in Belief Space for Partially Observable Task and Motion Problems
Paper and Code
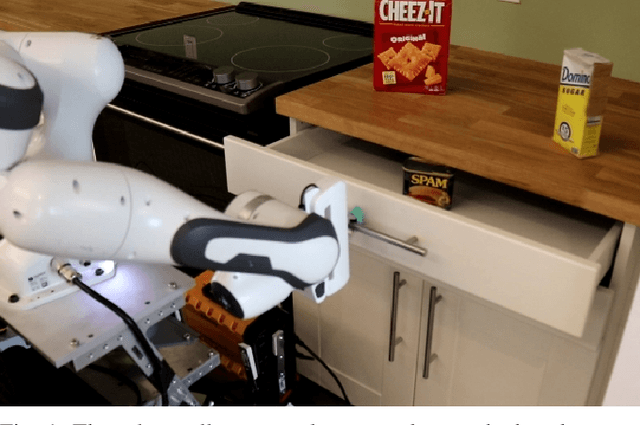
To solve multi-step manipulation tasks in the real world, an autonomous robot must take actions to observe its environment and react to unexpected observations. This may require opening a drawer to observe its contents or moving an object out of the way to examine the space behind it. If the robot fails to detect an important object, it must update its belief about the world and compute a new plan of action. Additionally, a robot that acts noisily will never exactly arrive at a desired state. Still, it is important that the robot adjusts accordingly in order to keep making progress towards achieving the goal. In this work, we present an online planning and execution system for robots faced with these kinds of challenges. Our approach is able to efficiently solve partially observable problems both in simulation and in a real-world kitchen.