 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Refinement of Low-level Feature Based Activation Map for Weakly Supervised Object Localization
Paper and Code
Oct 12, 2021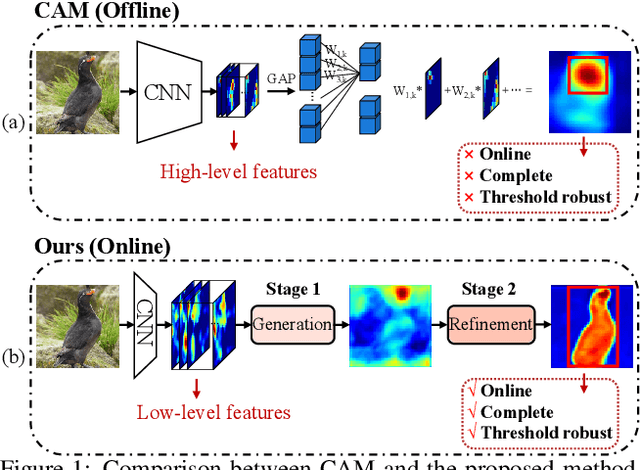
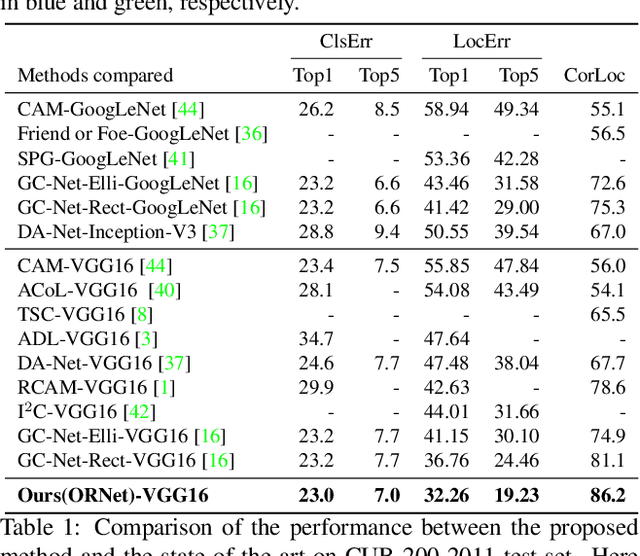
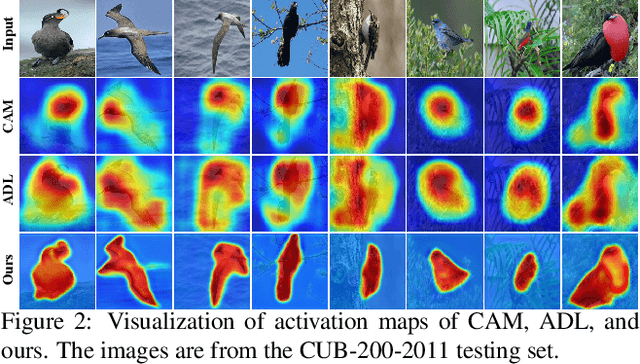
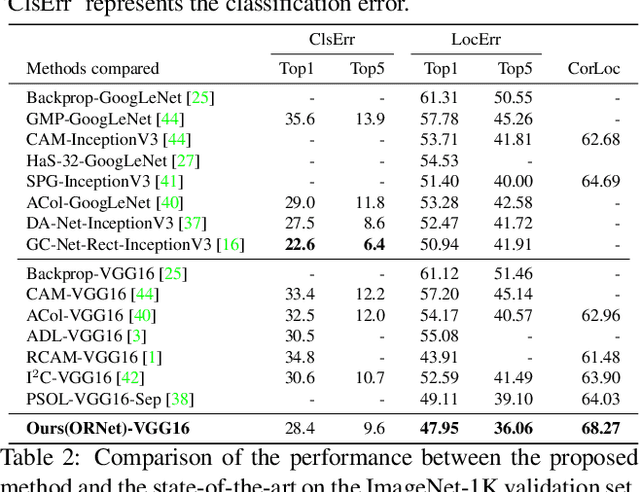
We present a two-stage learning framework for weakly supervised object localization (WSOL). While most previous efforts rely on high-level feature based CAMs (Class Activation Maps), this paper proposes to localize objects using the low-level feature based activation maps. In the first stage, an activation map generator produces activation maps based on the low-level feature maps in the classifier, such that rich contextual object information is included in an online manner. In the second stage, we employ an evaluator to evaluate the activation maps predicted by the activation map generator. Based on this, we further propose a weighted entropy loss, an attentive erasing, and an area loss to drive the activation map generator to substantially reduce the uncertainty of activations between object and background, and explore less discriminative regions. Based on the low-level object information preserved in the first stage, the second stage model gradually generates a well-separated, complete, and compact activation map of object in the image, which can be easily thresholded for accurate localization. Extensive experiments on CUB-200-2011 and ImageNet-1K datasets show that our framework surpasses previous methods by a large margin, which sets a new state-of-the-art for WSOL.