 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnePose: One-Shot Object Pose Estimation without CAD Models
Paper and Code
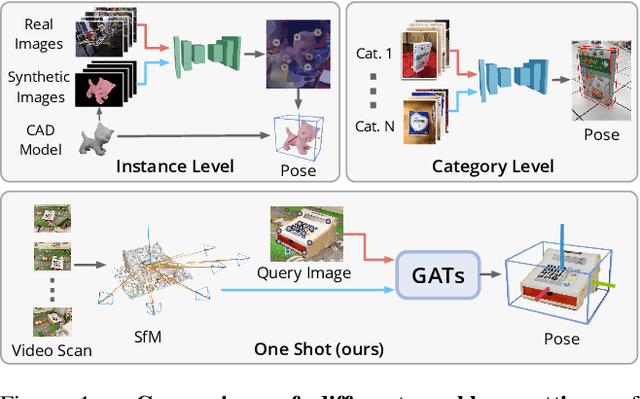

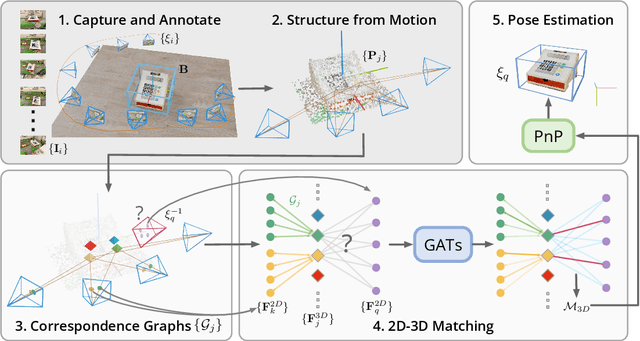
We propose a new method named OnePose for object pose estimation. Unlike existing instance-level or category-level methods, OnePose does not rely on CAD models and can handle objects in arbitrary categories without instance- or category-specific network training. OnePose draws the idea from visual localization and only requires a simple RGB video scan of the object to build a sparse SfM model of the object. Then, this model is registered to new query images with a generic feature matching network. To mitigate the slow runtime of existing visual localization methods, we propose a new graph attention network that directly matches 2D interest points in the query image with the 3D points in the SfM model, resulting in efficient and robust pose estimation. Combined with a feature-based pose tracker, OnePose is able to stably detect and track 6D poses of everyday household objects in real-time. We also collected a large-scale dataset that consists of 450 sequences of 150 objects.