 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOne-Shot Imitation Filming of Human Motion Videos
Paper and Code
Dec 23, 2019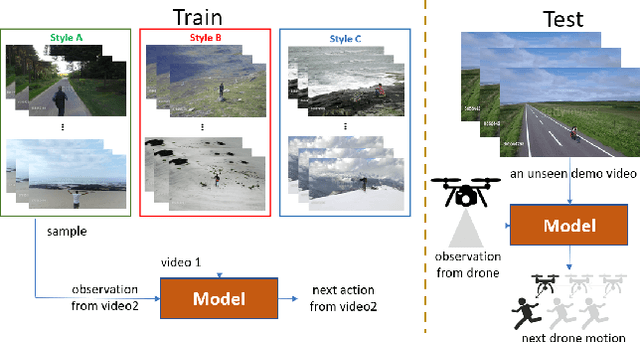
Imitation learning has been applied to mimic the operation of a human cameraman in several autonomous cinematography systems. To imitate different filming styles, existing methods train multiple models, where each model handles a particular style and requires a significant number of training samples. As a result, existing methods can hardly generalize to unseen styles. In this paper, we propose a framework, which can imitate a filming style by "seeing" only a single demonstration video of the same style, i.e., one-shot imitation filming. This is done by two key enabling techniques: 1) feature extraction of the filming style from the demo video, and 2) filming style transfer from the demo video to the new situation. We implement the approach with deep neural network and deploy it to a 6 degrees of freedom (DOF) real drone cinematography system by first predicting the future camera motions, and then converting them to the drone's control commands via an odometer. Our experimental results on extensive datasets and showcases exhibit significant improvements in our approach over conventional baselines and our approach can successfully mimic the footage with an unseen style.