 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOne RING to Rule Them All: Radon Sinogram for Place Recognition, Orientation and Translation Estimation
Paper and Code
Apr 17, 2022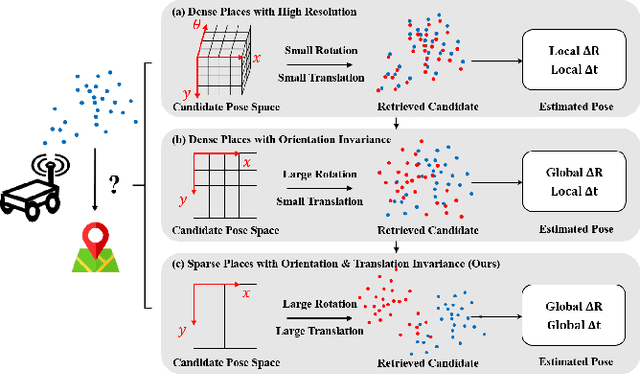

LiDAR-based global localization is a fundamental problem for mobile robots. It consists of two stages, place recognition and pose estimation, and yields the current orientation and translation, using only the current scan as query and a database of map scans. Inspired by the definition of a recognized place, we consider that a good global localization solution should keep the pose estimation accuracy with a lower place density. Following this idea, we propose a novel framework towards sparse place-based global localization, which utilizes a unified and learning-free representation, Radon sinogram (RING), for all sub-tasks. Based on the theoretical derivation, a translation invariant descriptor and an orientation invariant metric are proposed for place recognition, achieving certifiable robustness against arbitrary orientation and large translation between query and map scan. In addition, we also utilize the property of RING to propose a global convergent solver for both orientation and translation estimation, arriving at global localization. Evaluation of the proposed RING based framework validates the feasibility and demonstrates a superior performance even under a lower place density.