 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn-device Scalable Image-based Localization
Paper and Code
Feb 10, 2018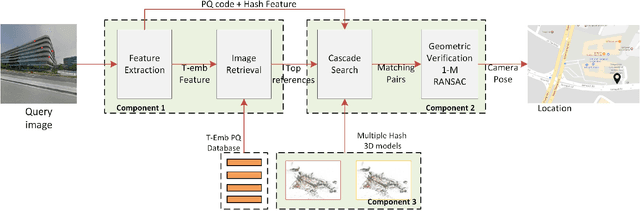
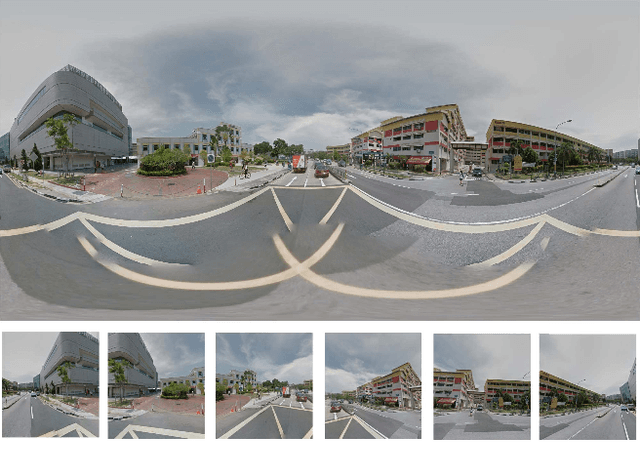
We present the scalable design of an entire on-device system for large-scale urban localization. The proposed design integrates compact image retrieval and 2D-3D correspondence search to estimate the camera pose in a city region of extensive coverage. Our design is GPS agnostic and does not require the network connection. The system explores the use of an abundant dataset: Google Street View (GSV). In order to overcome the resource constraints of mobile devices, we carefully optimize the system design at every stage: we use state-of-the-art image retrieval to quickly locate candidate regions and limit candidate 3D points; we propose a new hashing-based approach for fast computation of 2D-3D correspondences and new one-many RANSAC for accurate pose estimation. The experiments are conducted on benchmark datasets for 2D-3D correspondence search and on a database of over 227K Google Street View (GSV) images for the overall system. Results show that our 2D-3D correspondence search achieves state-of-the-art performance on some benchmark datasets and our system can accurately and quickly localize mobile images; the median error is less than 4 meters and the processing time is averagely less than 10s on a typical mobile device.