 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOffset-free setpoint tracking using neural network controllers
Paper and Code
Nov 23, 2020
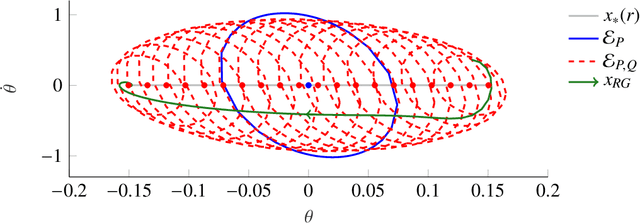
In this paper, we present a method to analyze local and global stability in offset-free setpoint tracking using neural network controllers and we provide ellipsoidal inner approximations of the corresponding region of attraction. We consider a feedback interconnection using a neural network controller in connection with an integrator, which allows for offset-free tracking of a desired piecewise constant reference that enters the controller as an external input. The feedback interconnection considered in this paper allows for general configurations of the neural network controller that include the special cases of output error and state feedback. Exploiting the fact that activation functions used in neural networks are slope-restricted, we derive linear matrix inequalities to verify stability using Lyapunov theory. After stating a global stability result, we present less conservative local stability conditions (i) for a given reference and (ii) for any reference from a certain set. The latter result even enables guaranteed tracking under setpoint changes using a reference governor which can lead to a significant increase of the region of attraction. Finally, we demonstrate the applicability of our analysis by verifying stability and offset-free tracking of a neural network controller that was trained to stabilize an inverted pendulum.