 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOff-Policy Reinforcement Learning with Loss Function Weighted by Temporal Difference Error
Paper and Code
Dec 26, 2022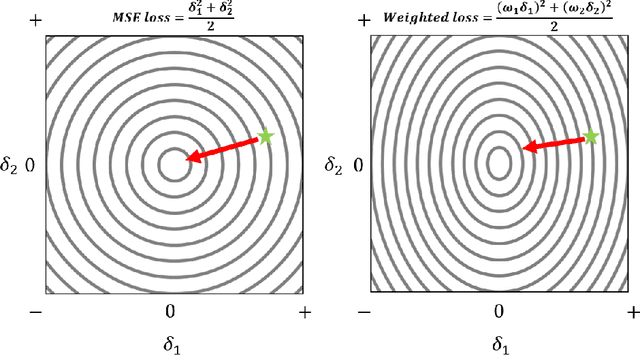
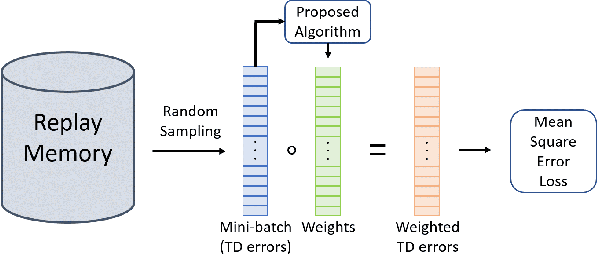
Training agents via off-policy deep reinforcement learning (RL) requires a large memory, named replay memory, that stores past experiences used for learning. These experiences are sampled, uniformly or non-uniformly, to create the batches used for training. When calculating the loss function, off-policy algorithms assume that all samples are of the same importance. In this paper, we hypothesize that training can be enhanced by assigning different importance for each experience based on their temporal-difference (TD) error directly in the training objective. We propose a novel method that introduces a weighting factor for each experience when calculating the loss function at the learning stage. In addition to improving convergence speed when used with uniform sampling, the method can be combined with prioritization methods for non-uniform sampling. Combining the proposed method with prioritization methods improves sampling efficiency while increasing the performance of TD-based off-policy RL algorithms. The effectiveness of the proposed method is demonstrated by experiments in six environments of the OpenAI Gym suite. The experimental results demonstrate that the proposed method achieves a 33%~76% reduction of convergence speed in three environments and an 11% increase in returns and a 3%~10% increase in success rate for other three environments.