 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOccupancy Map Prediction Using Generative and Fully Convolutional Networks for Vehicle Navigation
Paper and Code
Mar 06, 2018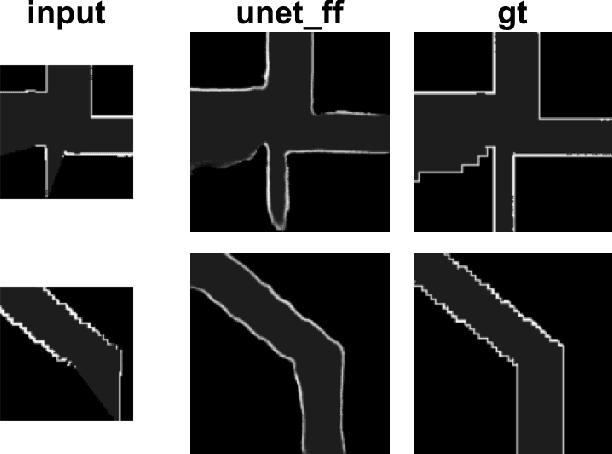
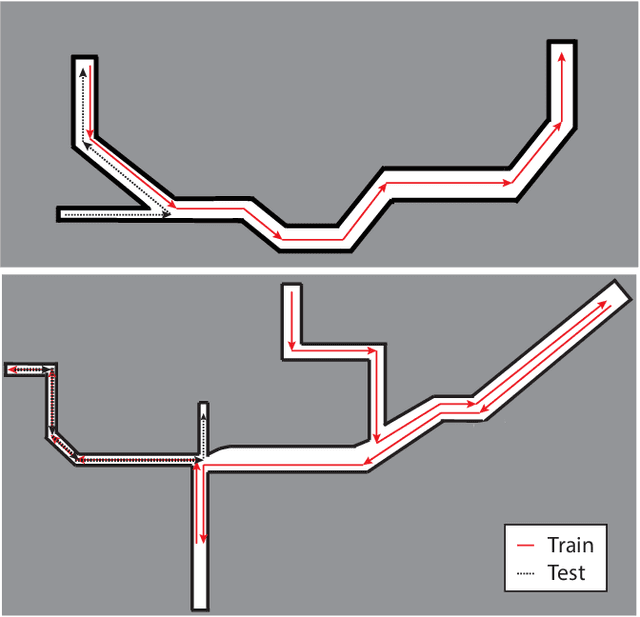
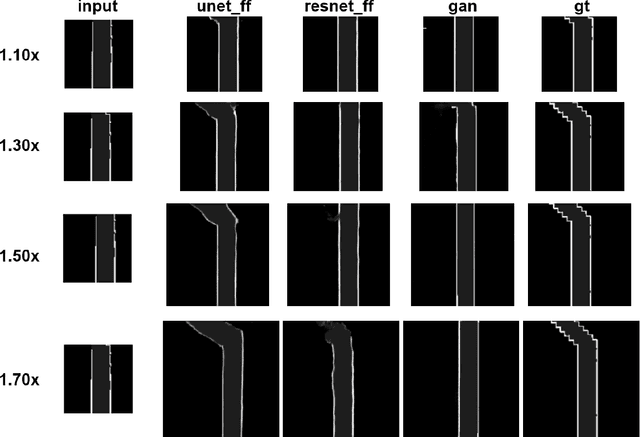
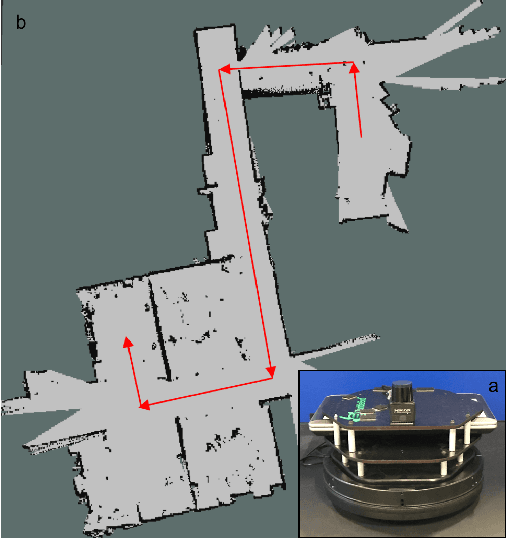
Fast, collision-free motion through unknown environments remains a challenging problem for robotic systems. In these situations, the robot's ability to reason about its future motion is often severely limited by sensor field of view (FOV). By contrast, biological systems routinely make decisions by taking into consideration what might exist beyond their FOV based on prior experience. In this paper, we present an approach for predicting occupancy map representations of sensor data for future robot motions using deep neural networks. We evaluate several deep network architectures, including purely generative and adversarial models. Testing on both simulated and real environments we demonstrated performance both qualitatively and quantitatively, with SSIM similarity measure up to 0.899. We showed that it is possible to make predictions about occupied space beyond the physical robot's FOV from simulated training data. In the future, this method will allow robots to navigate through unknown environments in a faster, safer manner.