 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObservability Analysis of Graph SLAM-Based Joint Calibration of Multiple Microphone Arrays and Sound Source Localization
Paper and Code
Oct 11, 2022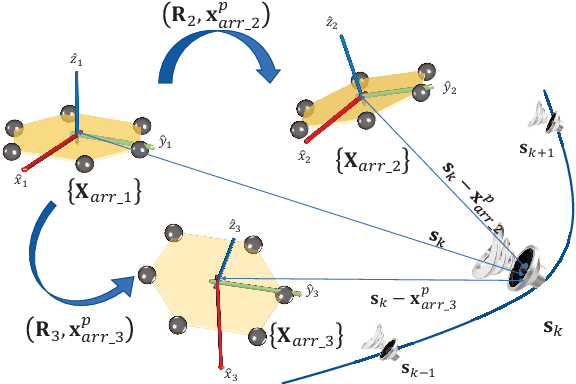
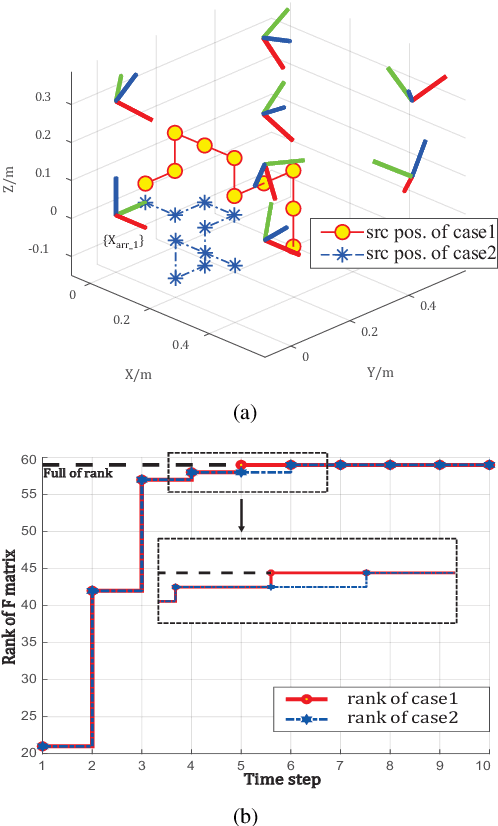
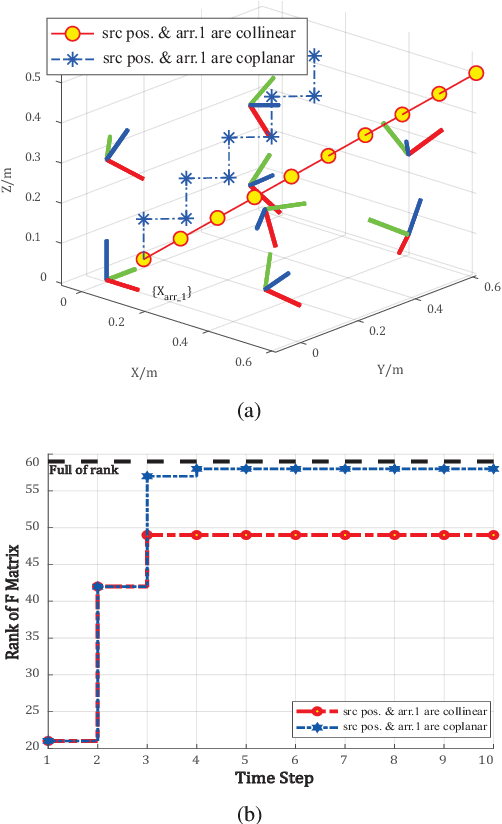
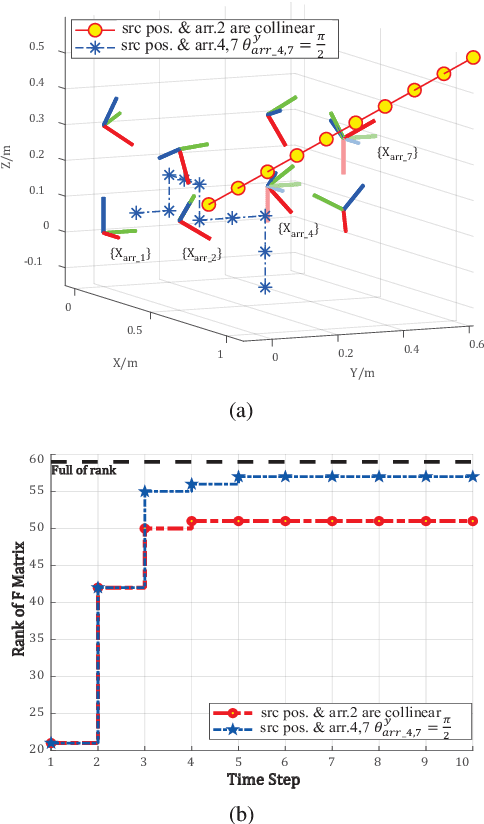
Multiple microphone arrays have many applications in robot audition, including sound source localization, audio scene perception and analysis, etc. However, accurate calibration of multiple microphone arrays remains a challenge because there are many unknown parameters to be identified, including the Euler angles, geometry, asynchronous factors between the microphone arrays. This paper is concerned with joint calibration of multiple microphone arrays and sound source localization using graph simultaneous localization and mapping (SLAM). By using a Fisher information matrix (FIM) approach, we focus on the observability analysis of the graph SLAM framework for the above-mentioned calibration problem. We thoroughly investigate the identifiability of the unknown parameters, including the Euler angles, geometry, asynchronous effects between the microphone arrays, and the sound source locations. We establish necessary/sufficient conditions under which the FIM and the Jacobian matrix have full column rank, which implies the identifiability of the unknown parameters. These conditions are closely related to the variation in the motion of the sound source and the configuration of microphone arrays, and have intuitive and physical interpretations. We also discover several scenarios where the unknown parameters are not uniquely identifiable. All theoretical findings are demonstrated using simulation data.