 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObjects as Extreme Points
Paper and Code
May 22, 2021
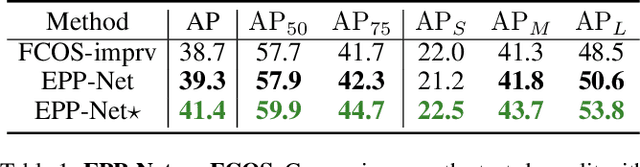
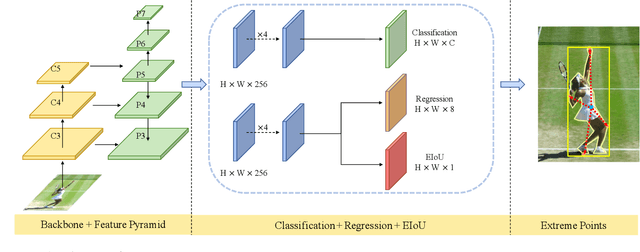
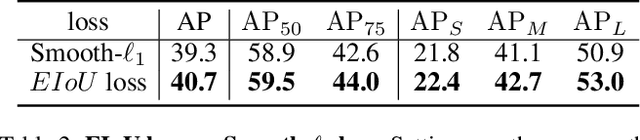
Object detection can be regarded as a pixel clustering task, and its boundary is determined by four extreme points (leftmost, top, rightmost, and bottom). However, most studies focus on the center or corner points of the object, which are actually conditional results of the extreme points. In this paper, we present an Extreme-Point-Prediction- Based object detector (EPP-Net), which directly regresses the relative displacement vector between each pixel and the four extreme points. We also propose a new metric to measure the similarity between two groups of extreme points, namely, Extreme Intersection over Union (EIoU), and incorporate this EIoU as a new regression loss. Moreover, we propose a novel branch to predict the EIoU between the ground-truth and the prediction results, and take it as the localization confidence to filter out poor detection results. On the MS-COCO dataset, our method achieves an average precision (AP) of 44.0% with ResNet-50 and an AP of 50.3% with ResNeXt-101-DCN. The proposed EPP-Net provides a new method to detect objects and outperforms state-of-the-art anchor-free detectors.