 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Detection in Equirectangular Panorama
Paper and Code


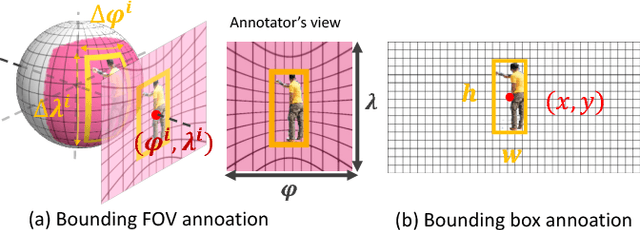
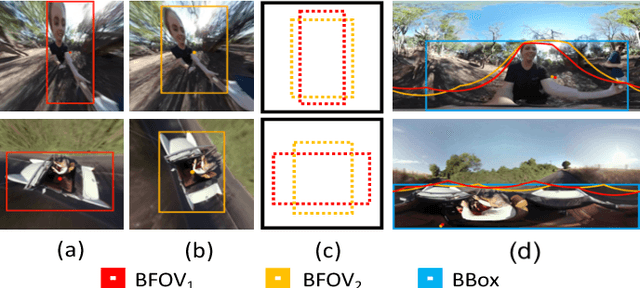
We introduced a high-resolution equirectangular panorama (360-degree, virtual reality) dataset for object detection and propose a multi-projection variant of YOLO detector. The main challenge with equirectangular panorama image are i) the lack of annotated training data, ii) high-resolution imagery and iii) severe geometric distortions of objects near the panorama projection poles. In this work, we solve the challenges by i) using training examples available in the "conventional datasets" (ImageNet and COCO), ii) employing only low-resolution images that require only moderate GPU computing power and memory, and iii) our multi-projection YOLO handles projection distortions by making multiple stereographic sub-projections. In our experiments, YOLO outperforms the other state-of-art detector, Faster RCNN and our multi-projection YOLO achieves the best accuracy with low-resolution input.