 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNovel Views of Objects from a Single Image
Paper and Code
Aug 15, 2016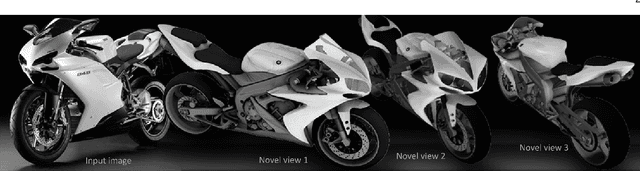
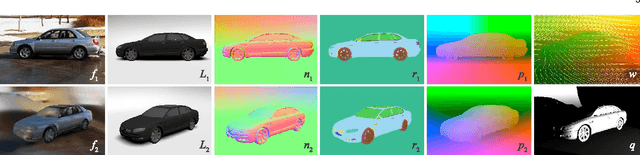


Taking an image of an object is at its core a lossy process. The rich information about the three-dimensional structure of the world is flattened to an image plane and decisions such as viewpoint and camera parameters are final and not easily revertible. As a consequence, possibilities of changing viewpoint are limited. Given a single image depicting an object, novel-view synthesis is the task of generating new images that render the object from a different viewpoint than the one given. The main difficulty is to synthesize the parts that are disoccluded; disocclusion occurs when parts of an object are hidden by the object itself under a specific viewpoint. In this work, we show how to improve novel-view synthesis by making use of the correlations observed in 3D models and applying them to new image instances. We propose a technique to use the structural information extracted from a 3D model that matches the image object in terms of viewpoint and shape. For the latter part, we propose an efficient 2D-to-3D alignment method that associates precisely the image appearance with the 3D model geometry with minimal user interaction. Our technique is able to simulate plausible viewpoint changes for a variety of object classes within seconds. Additionally, we show that our synthesized images can be used as additional training data that improves the performance of standard object detectors.