 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNovel class discovery meets foundation models for 3D semantic segmentation
Paper and Code
Dec 06, 2023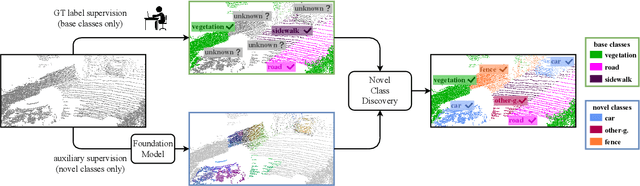
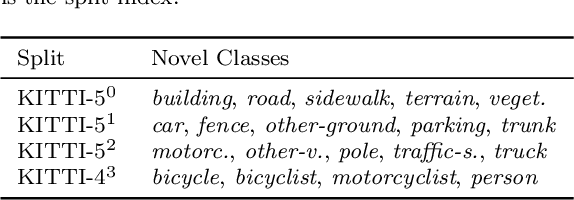
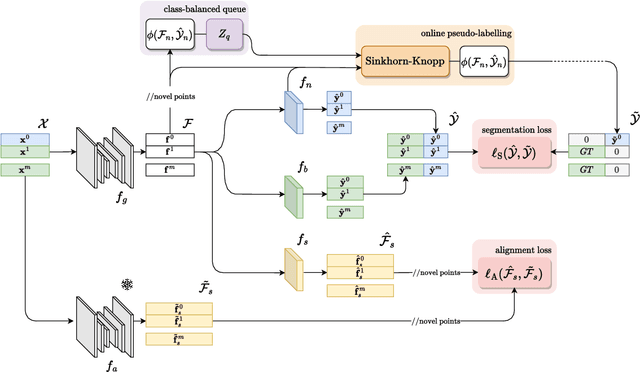
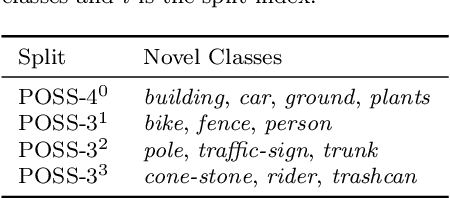
The task of Novel Class Discovery (NCD) in semantic segmentation entails training a model able to accurately segment unlabelled (novel) classes, relying on the available supervision from annotated (base) classes. Although extensively investigated in 2D image data, the extension of the NCD task to the domain of 3D point clouds represents a pioneering effort, characterized by assumptions and challenges that are not present in the 2D case. This paper represents an advancement in the analysis of point cloud data in four directions. Firstly, it introduces the novel task of NCD for point cloud semantic segmentation. Secondly, it demonstrates that directly transposing the only existing NCD method for 2D image semantic segmentation to 3D data yields suboptimal results. Thirdly, a new NCD approach based on online clustering, uncertainty estimation, and semantic distillation is presented. Lastly, a novel evaluation protocol is proposed to rigorously assess the performance of NCD in point cloud semantic segmentation. Through comprehensive evaluations on the SemanticKITTI, SemanticPOSS, and S3DIS datasets, the paper demonstrates substantial superiority of the proposed method over the considered baselines.