 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Class 3D Object Detection with Single-Class Supervision
Paper and Code
May 11, 2022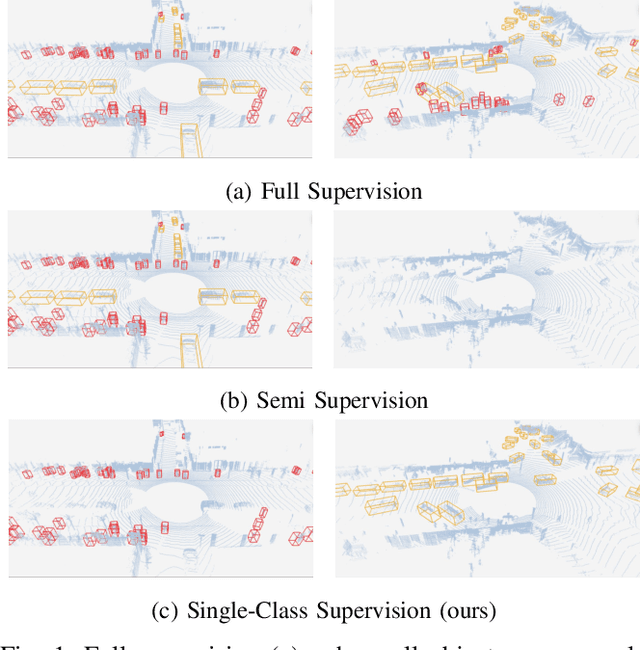
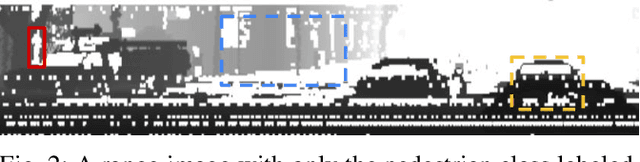
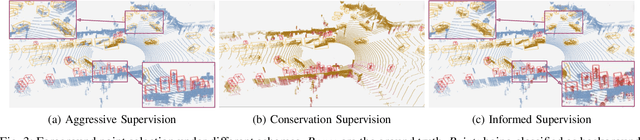
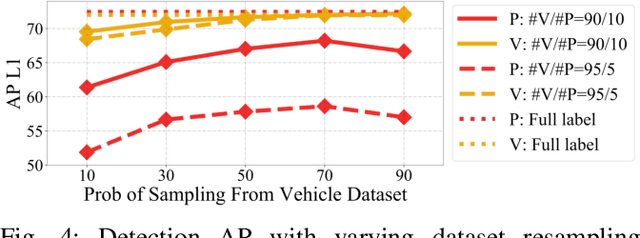
While multi-class 3D detectors are needed in many robotics applications, training them with fully labeled datasets can be expensive in labeling cost. An alternative approach is to have targeted single-class labels on disjoint data samples. In this paper, we are interested in training a multi-class 3D object detection model, while using these single-class labeled data. We begin by detailing the unique stance of our "Single-Class Supervision" (SCS) setting with respect to related concepts such as partial supervision and semi supervision. Then, based on the case study of training the multi-class version of Range Sparse Net (RSN), we adapt a spectrum of algorithms -- from supervised learning to pseudo-labeling -- to fully exploit the properties of our SCS setting, and perform extensive ablation studies to identify the most effective algorithm and practice. Empirical experiments on the Waymo Open Dataset show that proper training under SCS can approach or match full supervision training while saving labeling costs.