Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Path Finding with Deadlines
Paper and Code
Jun 11, 2018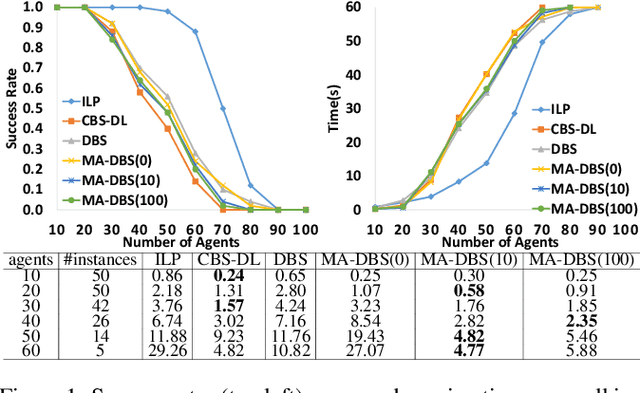
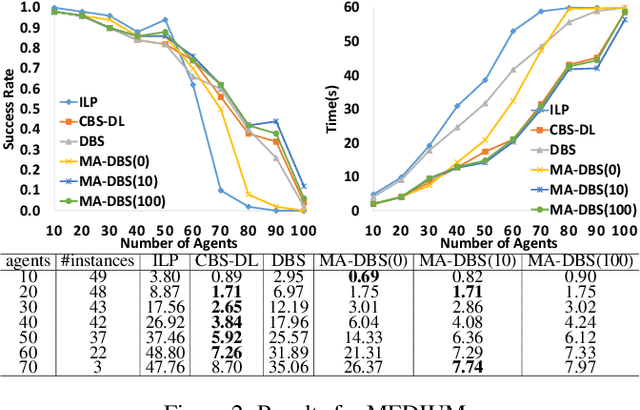
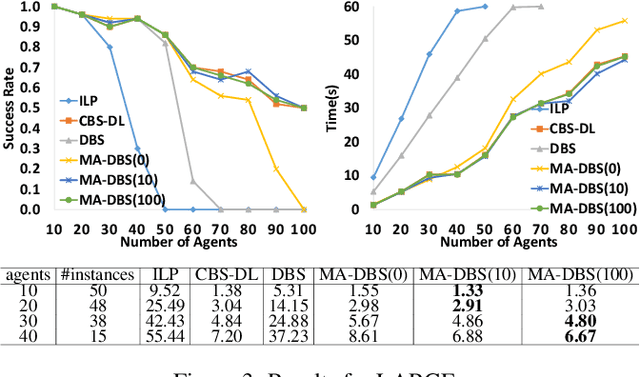
We formalize Multi-Agent Path Finding with Deadlines (MAPF-DL). The objective is to maximize the number of agents that can reach their given goal vertices from their given start vertices within the deadline, without colliding with each other. We first show that MAPF-DL is NP-hard to solve optimally. We then present two classes of optimal algorithms, one based on a reduction of MAPF-DL to a flow problem and a subsequent compact integer linear programming formulation of the resulting reduced abstracted multi-commodity flow network and the other one based on novel combinatorial search algorithms. Our empirical results demonstrate that these MAPF-DL solvers scale well and each one dominates the other ones in different scenarios.
* IJCAI 2018, to appear
View paper on