 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMQA: Answering the Question via Robotic Manipulation
Paper and Code
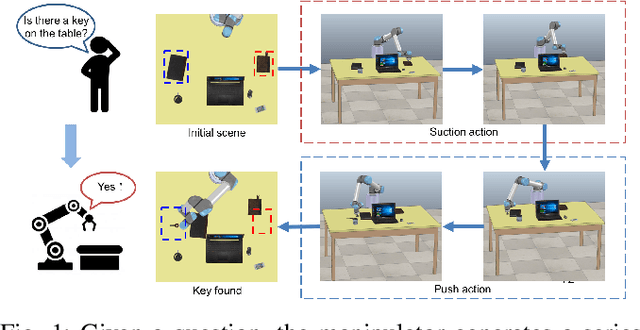
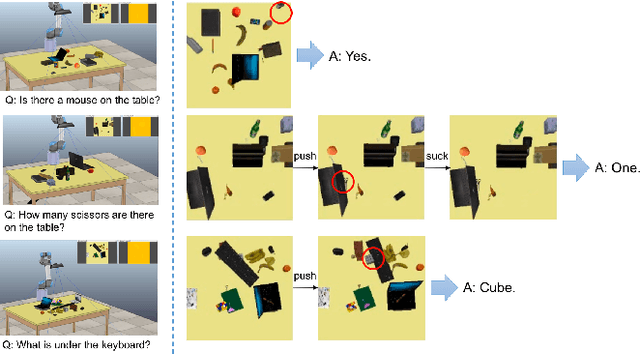
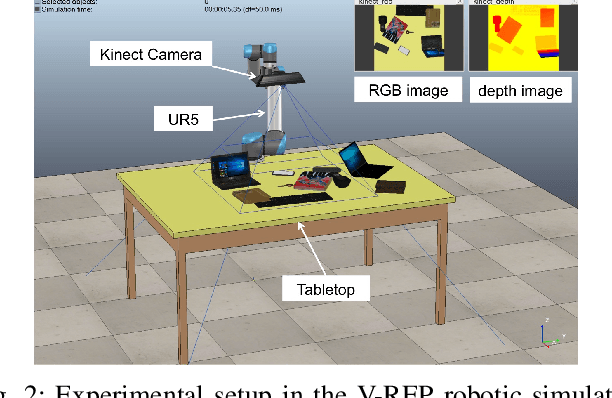
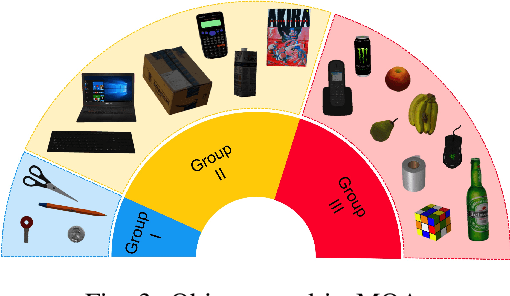
In this paper,we propose a novel task of Manipulation Question Answering(MQA),a class of Question Answering (QA) task, where the robot is required to find the answer to the question by actively interacting with the environment via manipulation. Considering the tabletop scenario, a heatmap of the scene is generated to facilitate the robot to have a semantic understanding of the scene and an imitation learning approach with semantic understanding metric is proposed to generate manipulation actions which guide the manipulator to explore the tabletop to find the answer to the question. Besides, a novel dataset which contains a variety of tabletop scenarios and corresponding question-answer pairs is established. Extensive experiments have been conducted to validate the effectiveness of the proposed framework.